ความง่ายในการแปลงแรงดันไฟฟ้ากระแสสลับทำให้มีการใช้กันอย่างแพร่หลายในแหล่งจ่ายไฟฟ้า ในด้านการออกแบบมอเตอร์ไฟฟ้า มีการค้นพบข้อดีอีกประการหนึ่งของกระแสสลับ: ความสามารถในการสร้างการหมุน สนามแม่เหล็กโดยไม่มีการเปลี่ยนแปลงเพิ่มเติมหรือมีจำนวนขั้นต่ำ
ดังนั้นแม้จะมีการสูญเสียบางอย่างเนื่องจากความต้านทานปฏิกิริยา (อุปนัย) ของขดลวด ความง่ายในการสร้างมอเตอร์ไฟฟ้ากระแสสลับก็มีส่วนทำให้ได้รับชัยชนะเหนือแหล่งจ่ายไฟกระแสตรงเมื่อต้นศตวรรษที่ 20
โดยพื้นฐานแล้ว มอเตอร์ไฟฟ้ากระแสสลับสามารถแบ่งออกเป็นสองกลุ่ม:
แบบอะซิงโครนัส
ในนั้นการหมุนของโรเตอร์จะมีความเร็วแตกต่างจากการหมุนของสนามแม่เหล็กเนื่องจากสามารถทำงานด้วยความเร็วที่หลากหลาย มอเตอร์ AC ประเภทนี้พบได้บ่อยที่สุดในปัจจุบัน ซิงโครนัส
มอเตอร์เหล่านี้มีการเชื่อมต่อที่แน่นแฟ้นระหว่างความเร็วของโรเตอร์กับความเร็วการหมุนของสนามแม่เหล็ก ผลิตได้ยากกว่าและมีความยืดหยุ่นในการใช้งานน้อยกว่า (การเปลี่ยนความเร็วที่ความถี่คงที่ของเครือข่ายจ่ายไฟสามารถทำได้โดยการเปลี่ยนจำนวนเสาสเตเตอร์เท่านั้น)
ใช้เฉพาะที่กำลังไฟสูงหลายร้อยกิโลวัตต์เท่านั้น ซึ่งมีประสิทธิภาพที่สูงกว่าเมื่อเปรียบเทียบกับมอเตอร์ไฟฟ้าแบบอะซิงโครนัสช่วยลดการสูญเสียความร้อนได้อย่างมาก
มอเตอร์ไฟฟ้ากระแสสลับแบบอะซิงโครนัส
มอเตอร์แบบอะซิงโครนัสชนิดที่พบบ่อยที่สุดคือมอเตอร์ไฟฟ้าที่มีโรเตอร์แบบกรงกระรอกประเภท "กรงกระรอก" ซึ่งชุดแท่งนำไฟฟ้าจะถูกวางไว้ในร่องเอียงของโรเตอร์ซึ่งเชื่อมต่อที่ปลายด้วยวงแหวน
ประวัติความเป็นมาของมอเตอร์ไฟฟ้าประเภทนี้ย้อนกลับไปกว่าร้อยปีเมื่อสังเกตเห็นว่าวัตถุนำไฟฟ้าที่วางอยู่ในช่องว่างของแกนกลางของแม่เหล็กไฟฟ้ากระแสสลับมีแนวโน้มที่จะแตกออกมาเนื่องจากการเกิดแรงเคลื่อนไฟฟ้าเหนี่ยวนำ โดยมีเวกเตอร์ตรงข้ามอยู่ในนั้น
ดังนั้น มอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์แบบกรงกระรอกจึงไม่มีหน่วยสัมผัสทางกลใดๆ นอกเหนือจากแบริ่งรองรับโรเตอร์ ซึ่งให้มอเตอร์ประเภทนี้ไม่เพียงแต่ ราคาถูกแต่ยังมีความคงทนสูงสุดอีกด้วย ด้วยเหตุนี้มอเตอร์ไฟฟ้าประเภทนี้จึงกลายเป็นเรื่องธรรมดาที่สุดในอุตสาหกรรมสมัยใหม่
อย่างไรก็ตามยังมีข้อเสียบางประการที่ต้องนำมาพิจารณาเมื่อออกแบบมอเตอร์ไฟฟ้าแบบอะซิงโครนัสประเภทนี้:
กระแสไฟสตาร์ทสูง– เนื่องจากในขณะนี้มอเตอร์ไฟฟ้าไร้แปรงถ่านแบบอะซิงโครนัสเชื่อมต่อกับเครือข่าย รีแอกแตนซ์ขดลวดสเตเตอร์ยังไม่ได้รับผลกระทบจากสนามแม่เหล็กที่สร้างโดยโรเตอร์ กระแสไฟกระชากที่รุนแรงเกิดขึ้น ซึ่งมากกว่าการใช้กระแสไฟที่กำหนดหลายเท่า
คุณลักษณะการทำงานของมอเตอร์ประเภทนี้จะต้องรวมอยู่ในแหล่งจ่ายไฟที่ออกแบบทั้งหมดเพื่อหลีกเลี่ยงการโอเวอร์โหลด โดยเฉพาะอย่างยิ่งเมื่อเชื่อมต่อมอเตอร์ไฟฟ้าแบบอะซิงโครนัสกับเครื่องกำเนิดไฟฟ้าเคลื่อนที่ที่มีกำลังไฟจำกัด
แรงบิดเริ่มต้นต่ำ– มอเตอร์ไฟฟ้าที่มีขดลวดแบบกรงกระรอกมีการขึ้นอยู่กับแรงบิดกับความเร็วอย่างชัดเจน ดังนั้นจึงไม่เป็นที่พึงปรารถนาอย่างยิ่งที่จะเปิดใช้งานภายใต้ภาระ: เวลาในการเข้าสู่โหมดระบุและกระแสเริ่มต้นเพิ่มขึ้นอย่างมีนัยสำคัญ ขดลวดสเตเตอร์มีภาระมากเกินไป
สิ่งนี้จะเกิดขึ้นเมื่อคุณเปิดเครื่อง ปั๊มบ่อลึก– ในวงจรไฟฟ้าของแหล่งจ่ายไฟจำเป็นต้องคำนึงถึงปริมาณสำรองกระแสไฟฟ้าห้าถึงเจ็ดเท่า
ความเป็นไปไม่ได้ที่จะสตาร์ทโดยตรงในวงจรกระแสเฟสเดียว- เพื่อให้โรเตอร์เริ่มหมุน จำเป็นต้องกดสตาร์ทหรือป้อนขดลวดเฟสเพิ่มเติม ซึ่งเลื่อนไปในเฟสที่สัมพันธ์กัน
สำหรับการเริ่มต้น มอเตอร์ไฟฟ้าแบบอะซิงโครนัสแอร์เข้า เครือข่ายเฟสเดียวไม่ว่าจะใช้การม้วนสตาร์ทแบบสวิตช์ด้วยตนเอง ซึ่งจะปิดหลังจากหมุนโรเตอร์ขึ้น หรือการม้วนที่สองที่เชื่อมต่อผ่านองค์ประกอบการเปลี่ยนเฟส (ส่วนใหญ่มักจะเป็นตัวเก็บประจุที่มีความจุที่ต้องการ)
ขาดความเป็นไปได้ที่จะได้รับความเร็วในการหมุนสูง- แม้ว่าการหมุนของโรเตอร์จะไม่ซิงโครไนซ์กับความถี่การหมุนของสนามแม่เหล็กสเตเตอร์ แต่ก็ไม่สามารถเคลื่อนที่ไปข้างหน้าได้ ดังนั้นในเครือข่าย 50 Hz ความเร็วสูงสุดสำหรับมอเตอร์ไฟฟ้าแบบอะซิงโครนัสกับโรเตอร์กรงกระรอกจะไม่มีอีกต่อไป มากกว่า 3,000 รอบต่อนาที
การเพิ่มความเร็วในการหมุนของมอเตอร์แบบอะซิงโครนัสจำเป็นต้องใช้ตัวแปลงความถี่ (อินเวอร์เตอร์) ซึ่งทำให้ระบบดังกล่าวมีราคาแพงกว่ามอเตอร์แบบมีแปรงถ่าน นอกจากนี้ เมื่อความถี่เพิ่มขึ้น การสูญเสียจากปฏิกิริยาก็เพิ่มขึ้น
ความยากในการจัดระเบียบแบบย้อนกลับ- สิ่งนี้จำเป็นต้องหยุดเครื่องยนต์โดยสมบูรณ์และเปลี่ยนเฟสใหม่ ในเวอร์ชันเฟสเดียว - การเปลี่ยนเฟสในการพันสตาร์ทหรือเฟสที่สอง
สะดวกที่สุดในการใช้มอเตอร์ไฟฟ้าแบบอะซิงโครนัสในเครือข่ายสามเฟสอุตสาหกรรมเนื่องจากการสร้างสนามแม่เหล็กหมุนได้กระทำโดยขดลวดเฟสเองโดยไม่ต้องใช้อุปกรณ์เพิ่มเติม
อันที่จริงห่วงโซ่ประกอบด้วย เครื่องกำเนิดไฟฟ้าสามเฟสและมอเตอร์ไฟฟ้าถือได้ว่าเป็นตัวอย่างของการส่งผ่านไฟฟ้า: เครื่องกำเนิดไฟฟ้าจะสร้างสนามแม่เหล็กหมุนอยู่ในนั้นแปลงเป็นการแกว่ง กระแสไฟฟ้าในทางกลับกัน การหมุนของสนามแม่เหล็กในมอเตอร์ไฟฟ้าก็น่าตื่นเต้นเช่นกัน
นอกจากนี้ด้วยแหล่งจ่ายไฟสามเฟสที่มอเตอร์ไฟฟ้าแบบอะซิงโครนัสมีประสิทธิภาพสูงสุดเนื่องจากในเครือข่ายเฟสเดียวสนามแม่เหล็กที่สร้างโดยสเตเตอร์สามารถแบ่งออกเป็นสองแอนติเฟสเป็นหลักซึ่งจะเพิ่มการสูญเสียที่ไร้ประโยชน์เนื่องจากความอิ่มตัวมากเกินไป ของแกนกลาง ดังนั้นมอเตอร์ไฟฟ้าเฟสเดียวที่ทรงพลังมักถูกสร้างขึ้นโดยใช้วงจรสับเปลี่ยน
เครื่องสะสมมอเตอร์ไฟฟ้ากระแสสลับ
ในมอเตอร์ไฟฟ้าประเภทนี้ สนามแม่เหล็กของโรเตอร์จะถูกสร้างขึ้นโดยขดลวดเฟสที่เชื่อมต่อกับตัวสับเปลี่ยน จริงๆ แล้วมอเตอร์ AC แบบมีแปรงถ่านนั้นแตกต่างจากมอเตอร์ กระแสตรงเพียงเพราะว่าค่ารีแอกแตนซ์ของขดลวดถูกรวมไว้ในการคำนวณด้วย
ในบางกรณี มอเตอร์สับเปลี่ยนอเนกประสงค์จะถูกสร้างขึ้นด้วยซ้ำ โดยที่ขดลวดสเตเตอร์มีการเชื่อมต่อจากส่วนที่ไม่สมบูรณ์เพื่อรวมไว้ในเครือข่ายไฟฟ้ากระแสสลับ และสามารถเชื่อมต่อแหล่งกำเนิดไฟฟ้ากระแสตรงเข้ากับความยาวของขดลวดได้เต็มที่
ข้อดีของเครื่องยนต์ประเภทนี้ชัดเจน:
ความสามารถในการทำงานด้วยความเร็วสูงช่วยให้คุณสร้างมอเตอร์ไฟฟ้าแบบสับเปลี่ยนด้วยความเร็วการหมุนสูงถึงหลายหมื่นรอบต่อนาทีซึ่งทุกคนคุ้นเคยจากสว่านไฟฟ้า
ไม่จำเป็นต้องมีอุปกรณ์สตาร์ทเพิ่มเติมตรงกันข้ามกับมอเตอร์กรงกระรอก
แรงบิดเริ่มต้นสูงซึ่งจะทำให้การกลับสู่โหมดการทำงานเร็วขึ้น รวมถึงขณะโหลดด้วย นอกจากนี้ แรงบิดของมอเตอร์ไฟฟ้าสับเปลี่ยนจะแปรผกผันกับความเร็ว และเมื่อโหลดเพิ่มขึ้น จะทำให้หลีกเลี่ยงไม่ให้ความเร็วในการหมุนลดลง
ควบคุมความเร็วได้ง่าย- เนื่องจากขึ้นอยู่กับแรงดันไฟฟ้าในการปรับความเร็วในการหมุนภายในขอบเขตที่กว้างที่สุดก็เพียงพอแล้วที่จะมีตัวควบคุมแรงดันไฟฟ้า triac แบบธรรมดา หากตัวควบคุมล้มเหลว สามารถเชื่อมต่อมอเตอร์สับเปลี่ยนกับเครือข่ายได้โดยตรง
ความเฉื่อยของโรเตอร์น้อยลง- สามารถทำให้มีขนาดกะทัดรัดกว่าการลัดวงจรได้มากเนื่องจากมอเตอร์คอมมิวเตเตอร์มีขนาดเล็กลงอย่างเห็นได้ชัด
นอกจากนี้ มอเตอร์คอมมิวเตเตอร์สามารถกลับด้านได้อย่างง่ายดาย ซึ่งมีความสำคัญอย่างยิ่งในการสร้างเครื่องมือไฟฟ้าประเภทต่างๆ และเครื่องมือกลจำนวนหนึ่ง
ด้วยเหตุผลเหล่านี้ มอเตอร์คอมมิวเตเตอร์จึงแพร่หลายในผู้บริโภคเฟสเดียวทุกรายซึ่งจำเป็นต้องมีการควบคุมความเร็วแบบยืดหยุ่น: ในเครื่องมือไฟฟ้ามือถือ เครื่องดูดฝุ่น เครื่องใช้ในครัวและอื่น ๆ อย่างไรก็ตามมีจำนวนหนึ่ง คุณสมบัติการออกแบบกำหนดลักษณะเฉพาะของการทำงานของมอเตอร์ไฟฟ้าสับเปลี่ยน:
มอเตอร์สับเปลี่ยนจำเป็นต้องเปลี่ยนแปรงเป็นประจำ ซึ่งจะเสื่อมสภาพตามกาลเวลา ตัวสะสมเองก็เสื่อมสภาพเช่นกันในขณะที่เครื่องยนต์ที่มีโรเตอร์กรงกระรอกดังที่เขียนไว้ข้างต้นโดยมีเงื่อนไขว่าตลับลูกปืนจะถูกเปลี่ยนไม่บ่อยนักก็จะเป็นนิรันดร์ในทางปฏิบัติ
ประกายไฟที่หลีกเลี่ยงไม่ได้ระหว่างตัวสับเปลี่ยนและแปรง (สาเหตุของกลิ่นที่คุ้นเคยของโอโซนระหว่างการทำงานของมอเตอร์ไฟฟ้าแบบสับเปลี่ยน) ไม่เพียงช่วยลดอายุการใช้งานเท่านั้น แต่ยังต้องมีมาตรการความปลอดภัยที่เพิ่มขึ้นระหว่างการทำงานเนื่องจากมีโอกาสเกิด การจุดระเบิดของก๊าซหรือฝุ่นที่ติดไฟได้
© 2012-2017 สงวนลิขสิทธิ์
เนื้อหาทั้งหมดที่นำเสนอบนเว็บไซต์นี้มีวัตถุประสงค์เพื่อให้ข้อมูลเท่านั้น และไม่สามารถใช้เป็นแนวทางหรือเอกสารกำกับดูแลได้
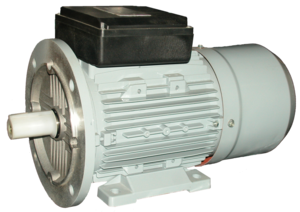
มอเตอร์ไฟฟ้าเฟสเดียว 220V เป็นกลไกแยกที่ใช้กันอย่างแพร่หลายในการติดตั้งในอุปกรณ์หลากหลายประเภท สามารถใช้ในครัวเรือนและอุตสาหกรรมได้ มอเตอร์ไฟฟ้าจ่ายไฟจากเต้ารับปกติซึ่งต้องมีกำลังไฟไม่ต่ำกว่า 220 โวลต์ ในกรณีนี้คุณต้องใส่ใจกับความถี่ 60 เฮิรตซ์
ในทางปฏิบัติ ได้รับการพิสูจน์แล้วว่ามีการขายมอเตอร์ไฟฟ้าเฟสเดียว 220 โวลต์พร้อมกับอุปกรณ์ดังกล่าว ช่วยแปลงพลังงาน สนามไฟฟ้า และยังสะสมประจุที่จำเป็นโดยใช้ตัวเก็บประจุอีกด้วย โมเดลที่ทันสมัยซึ่งผลิตตาม เทคโนโลยีที่เป็นนวัตกรรมมอเตอร์ไฟฟ้า 220V มีอุปกรณ์ส่องสว่างบริเวณที่ทำงานเพิ่มเติมด้วย สิ่งนี้ใช้กับชิ้นส่วนภายในและภายนอก
สิ่งสำคัญคือต้องจำไว้ว่าต้องจัดเก็บความจุของตัวเก็บประจุตามข้อกำหนดพื้นฐานทั้งหมด ทางเลือกที่ดีที่สุดคือสถานที่ที่ อุณหภูมิของอากาศยังคงไม่เปลี่ยนแปลงและไม่อยู่ภายใต้ความผันผวนใดๆ ในห้อง ระบอบการปกครองของอุณหภูมิไม่ควรลดลงเหลือค่าลบ
ขณะใช้งานเครื่องยนต์ ผู้เชี่ยวชาญแนะนำให้วัดค่าความจุของตัวเก็บประจุเป็นครั้งคราว
 มอเตอร์แบบอะซิงโครนัสถูกนำมาใช้กันอย่างแพร่หลายในปัจจุบันในด้านต่างๆ กระบวนการผลิต- มอเตอร์ไฟฟ้ารุ่นนี้ใช้สำหรับไดรฟ์ต่างๆ การออกแบบอะซิงโครนัสเฟสเดียวช่วยขับเคลื่อนเครื่องจักรงานไม้ ปั๊ม คอมเพรสเซอร์ อุปกรณ์ต่างๆ การระบายอากาศทางอุตสาหกรรม,สายพานลำเลียง,ลิฟท์ และอุปกรณ์อื่นๆอีกมากมาย
มอเตอร์แบบอะซิงโครนัสถูกนำมาใช้กันอย่างแพร่หลายในปัจจุบันในด้านต่างๆ กระบวนการผลิต- มอเตอร์ไฟฟ้ารุ่นนี้ใช้สำหรับไดรฟ์ต่างๆ การออกแบบอะซิงโครนัสเฟสเดียวช่วยขับเคลื่อนเครื่องจักรงานไม้ ปั๊ม คอมเพรสเซอร์ อุปกรณ์ต่างๆ การระบายอากาศทางอุตสาหกรรม,สายพานลำเลียง,ลิฟท์ และอุปกรณ์อื่นๆอีกมากมาย
มอเตอร์ไฟฟ้ายังใช้ในการขับเคลื่อนอุปกรณ์เครื่องจักรกลขนาดเล็กอีกด้วย ซึ่งรวมถึงเครื่องบดสับอาหารและเครื่องผสมคอนกรีต จำเป็นต้องซื้อโครงสร้างดังกล่าวจากซัพพลายเออร์ที่เชื่อถือได้เท่านั้น ก่อนซื้อขอแนะนำให้ตรวจสอบใบรับรองความสอดคล้องและการรับประกันจากผู้ผลิต
ซัพพลายเออร์จะต้องให้ลูกค้าของตนด้วย การบำรุงรักษาบริการมอเตอร์ไฟฟ้าในกรณีที่เครื่องเสียหรือชำรุด นี่เป็นหนึ่งในองค์ประกอบหลักที่เสร็จสมบูรณ์ระหว่างการประกอบชุดปั๊ม
มอเตอร์ไฟฟ้าซีรีย์ที่มีอยู่
วันนี้ สถานประกอบการอุตสาหกรรมผลิตชุดต่อไปนี้ มอเตอร์ไฟฟ้าเฟสเดียว 220V:

ครบทุกเครื่องยนต์แน่นอน แบ่งตามการออกแบบตามวิธีการติดตั้งตลอดจนระดับการป้องกัน ช่วยให้คุณสามารถปกป้องโครงสร้างจากความชื้นหรืออนุภาคทางกลได้
คุณสมบัติของมอเตอร์ไฟฟ้าซีรีย์ A
มอเตอร์ไฟฟ้าเฟสเดียวของซีรีส์ A ได้รับการออกแบบแบบอะซิงโครนัสแบบครบวงจร พวกเขาปิดให้บริการตั้งแต่ อิทธิพลภายนอกโดยใช้โรเตอร์กรงกระรอก
โครงสร้างของมอเตอร์ไฟฟ้ามีกลุ่มประสิทธิภาพดังต่อไปนี้:

ราคาของมอเตอร์ไฟฟ้า 220V เฟสเดียวขึ้นอยู่กับซีรีย์
มีเครื่องยนต์ประเภทใดบ้าง?
มอเตอร์เฟสเดียวได้รับการออกแบบมาเพื่อให้ขับเคลื่อนด้วยไฟฟ้าสำหรับใช้ในบ้านและอุตสาหกรรม การออกแบบดังกล่าวผลิตขึ้นตามมาตรฐานของรัฐ
3-7. อุปกรณ์ของมอเตอร์ไฟฟ้าเฟสเดียวแบบอะซิงโครนัส
ในรูป รูปที่ 3-16 แสดงการออกแบบมอเตอร์ไฟฟ้าเฟสเดียวแบบอะซิงโครนัสประเภท AOLB พร้อมตัวต้านทานสตาร์ทในตัว สเตเตอร์ของมอเตอร์ไฟฟ้าประกอบจากแผ่นเหล็กไฟฟ้า 15 ที่ประทับตราแล้วกดและเทลงในเปลือกอลูมิเนียม (ตัวเรือนสเตเตอร์) ที่มีผนังสองชั้น 13 ช่องถูกสร้างขึ้นระหว่างผนังเพื่อระบายความร้อนด้วยอากาศที่พื้นผิวของสเตเตอร์ ฝาครอบสองอัน 2 และ 17 หล่อจากอลูมิเนียมอัลลอยด์วางอยู่บนที่ลับคมตัวเรือนสเตเตอร์
ฝาครอบด้านหน้า 17 มีฝาปิดที่ประทับตรา 18 ซึ่งมีรูอยู่ที่ปลาย ผ่านรูเหล่านี้เมื่อโรเตอร์หมุน พัดลม 19 ที่ติดตั้งที่ปลายเพลาโรเตอร์จะดูดอากาศเข้าไป ตัวพัดลมทำจากอลูมิเนียมอัลลอยด์และยึดเข้ากับแกนด้วยสกรู
แผ่นสเตเตอร์มีการประทับด้วยร่องรูปลูกแพร์ 24 ร่อง ในจำนวนนี้มี 16 ช่องถูกครอบครองโดยสายไฟของขดลวดที่ใช้งานและ 8 ช่องถูกครอบครองโดยสายไฟของขดลวดเริ่มต้น ปลายเอาต์พุตของการทำงานและขดลวดเริ่มต้นจะถูกนำออกไปที่สกรูหน้าสัมผัส 4 ที่อยู่ในกล่องขั้วต่อ 11 แกนโรเตอร์ประกอบจากแผ่นเหล็กไฟฟ้า 12 แผ่นแล้วกดลงบนพื้นผิวลูกฟูกของส่วนตรงกลางของเพลา 1 ขดลวดอลูมิเนียม 14 พร้อมวงแหวนปิดและใบพัดลมถูกเทลงในร่องของโรเตอร์ จุดประสงค์ของพัดลมคือการพ่นอากาศร้อนไปยังผนังด้านนอกที่ระบายความร้อนของเคส
![]()
สวิตช์แบบแรงเหวี่ยงสำหรับขดลวดเริ่มต้นติดตั้งอยู่บนโรเตอร์ ประกอบด้วยคันโยก 7 สองคันพร้อมตุ้มน้ำหนัก 9 วางอยู่บนเพลา 8 ซึ่งกดเป็นใบพัดลมสี่ใบ คันโยกถูกกดด้วยหมุด 6 บนปลอกพลาสติก 5 ซึ่งวางอยู่บนเพลาอย่างหลวมๆ เมื่อโรเตอร์เร่งความเร็ว เมื่อความถี่การหมุนเข้าใกล้ค่าที่กำหนด น้ำหนักถ่วงจะอยู่ภายใต้อิทธิพลของ แรงเหวี่ยงแยกออกโดยหมุนคันโยกรอบแกน
ในกรณีนี้ ปลอก 5 เลื่อนไปทางขวา บีบอัดสปริง 10 และปล่อยสปริงหน้าสัมผัส 4 ซึ่งปิดวงจรสตาร์ทของขดลวด เมื่อโรเตอร์อยู่กับที่ หน้าสัมผัสนี้จะถูกปิดที่ปลายบุชชิ่งโดยมีหน้าสัมผัสอยู่กับที่ 3
หน้าสัมผัสแบบเคลื่อนที่และแบบคงที่จะติดตั้งอยู่บนแผ่นฉนวนที่ฝาด้านหลังของมอเตอร์ไฟฟ้า 2 มีการติดตั้งรีเลย์ความร้อนซึ่งจะตัดการเชื่อมต่อมอเตอร์ไฟฟ้าจากเครือข่ายเมื่อมีความร้อนสูงเกินไป ขาตั้ง 16 มีหมุด 4 ตัวใช้ยึดมอเตอร์ไฟฟ้า
แผนภาพการเชื่อมต่อมอเตอร์ไฟฟ้าแสดงในรูปที่ 1 3-17.
แรงดันไฟฟ้าจ่ายให้กับขั้วต่อ C 1 และ C 2 จากเทอร์มินัลเหล่านี้แรงดันไฟฟ้าจะถูกส่งไปยังขดลวดทำงานผ่านหน้าสัมผัสของรีเลย์ความร้อน RT ซึ่งประกอบด้วยขดลวดแผ่น bimetallic และหน้าสัมผัส เมื่อมอเตอร์ไฟฟ้าร้อนเกินขีดจำกัดที่อนุญาต แผ่นจะโค้งงอและเปิดหน้าสัมผัส ที่ ไฟฟ้าลัดวงจรกระแสไฟฟ้าขนาดใหญ่จะไหลผ่านขดลวดของรีเลย์ความร้อน แผ่นจะร้อนขึ้นอย่างรวดเร็วและเปิดหน้าสัมผัส ในกรณีนี้ขดลวด C ที่ใช้งานและสตาร์ท P จะถูกตัดพลังงานเนื่องจากทั้งคู่ขับเคลื่อนผ่านรีเลย์ความร้อน ดังนั้นรีเลย์ความร้อนจึงป้องกันมอเตอร์ไฟฟ้าจากการโอเวอร์โหลดและการลัดวงจร
ขดลวดเริ่มต้นได้รับพลังงานจากเทอร์มินัล C 1 และ C 2 ผ่านจัมเปอร์ C 2 - P 1 หน้าสัมผัสของสวิตช์แรงเหวี่ยง VTs จัมเปอร์ VTs - RT หน้าสัมผัสของรีเลย์ความร้อน RT เมื่อสตาร์ทมอเตอร์ไฟฟ้า เมื่อโรเตอร์ถึงความเร็วการหมุนที่ 70-80% ของความเร็วที่กำหนด หน้าสัมผัสของสวิตช์แรงเหวี่ยงจะเปิดขึ้น และขดลวดสตาร์ทจะถูกตัดการเชื่อมต่อจากเครือข่าย เมื่อเปิดมอเตอร์ไฟฟ้า เมื่อความเร็วของโรเตอร์ลดลง หน้าสัมผัสของสวิตช์แรงเหวี่ยงจะปิดอีกครั้ง และจะเตรียมขดลวดสตาร์ทสำหรับการสตาร์ทครั้งถัดไป
ในรูป รูปที่ 3-18 แสดงการออกแบบมอเตอร์ไฟฟ้าแบบอะซิงโครนัสประเภท ABE มอเตอร์เหล่านี้เชื่อมต่อกับเครือข่ายโดยมีขดลวดเสริมที่เปิดอยู่ตลอดเวลาในวงจรที่เชื่อมต่อตัวเก็บประจุเป็นอนุกรม (รูปที่ 3-9) มอเตอร์ไฟฟ้าประเภท ABE ไม่มีตัวเครื่องที่แข็งจึงเรียกว่ามอเตอร์ไฟฟ้าในตัว มอเตอร์ไฟฟ้าเชื่อมต่อกับกลไกขับเคลื่อนโดยใช้หน้าแปลนหรือฉากยึด
ตัวเรือนมอเตอร์ไฟฟ้าเป็นแพ็คเกจแกนสเตเตอร์ 1 ทำจากแผ่นเหล็กไฟฟ้าหนา 0.5 มม. บรรจุภัณฑ์ถูกกดและเติมด้วยอลูมิเนียมอัลลอยด์ภายใต้แรงกด ที่ปลายสเตเตอร์จะมีวงแหวนแรงดัน 5 และแท่งอลูมิเนียมสี่แท่งที่ขันให้แน่น ช่องสเตเตอร์ประกอบด้วยขดลวดทำงานและขดลวดเสริม 6 ขดลวด โล่แบริ่ง 4 และ 7. ปลายของขดลวด 8 ถูกนำออกมาผ่านบุชยาง 9 ในแผงป้องกันแบริ่งเพื่อเชื่อมต่อกับเครือข่าย โล่แบริ่งถูกขันให้แน่นด้วยกระดุมสี่อัน
โรเตอร์ของมอเตอร์ไฟฟ้าประกอบจากแผ่นเหล็กไฟฟ้าและเติมด้วยอลูมิเนียม 2 ประกอบกับขดลวดของโรเตอร์ ปีกพัดลมถูกหล่อเพื่อระบายความร้อนของมอเตอร์ไฟฟ้า โรเตอร์หมุนด้วยลูกปืนสองตัว 3
มอเตอร์ไฟฟ้ามีตัวอักษรและ การกำหนดแบบดิจิทัลประเภทเช่นมอเตอร์ไฟฟ้า AVE 041-2 ถูกถอดรหัสดังนี้: A - อะซิงโครนัส, B - ในตัว, E - เฟสเดียว,
4 - หมายเลขขนาด 1 - หมายเลขซีเรียลความยาวของแกนสเตเตอร์และหมายเลข 2 คั่นด้วยเส้นประ - จำนวนเสา
3-8. มอเตอร์ไฟฟ้าเฟสเดียวแบบซิงโครนัส
ในบางกรณีจำเป็นต้องใช้มอเตอร์ไฟฟ้าซึ่งความเร็วในการหมุนจะต้องคงที่อย่างเคร่งครัดโดยไม่คำนึงถึงภาระ ด้วยเหตุนี้ จึงมีการใช้มอเตอร์ไฟฟ้าแบบซิงโครนัส ซึ่งความเร็วในการหมุนของโรเตอร์จะเท่ากับความถี่การหมุนของสนามแม่เหล็กเสมอและถูกกำหนดโดย (3-2) มอเตอร์ไฟฟ้าซิงโครนัสมีหลายประเภททั้งแบบสามเฟสและเฟสเดียว ที่นี่เราพิจารณาเพียงสองสิ่งที่สำคัญที่สุดเท่านั้น ประเภทเรียบง่ายมอเตอร์ไฟฟ้าซิงโครนัสเฟสเดียว: ปฏิกิริยาและปฏิกิริยาตัวเก็บประจุ

ในรูป รูปที่ 3-19 แสดงแผนภาพการออกแบบของมอเตอร์รีลัคแทนซ์เฟสเดียวที่ง่ายที่สุด ซึ่งเป็นที่รู้จักในเทคโนโลยีว่าล้อ La Cura สเตเตอร์ 1 และโรเตอร์ 2 ประกอบขึ้นจากแผ่นเหล็กไฟฟ้าที่มีการประทับตรา ขดลวดที่ขับเคลื่อนโดยเครือข่ายไฟฟ้ากระแสสลับเฟสเดียวจะพันอยู่บนสเตเตอร์ ทำให้เกิดสนามแม่เหล็กที่เต้นเป็นจังหวะ มอเตอร์ฝืนใจได้ชื่อมาจากโรเตอร์หมุนเนื่องจากปฏิกิริยาของแรงดึงดูดแม่เหล็กสองแรง
ด้วยสนามที่เร้าใจ มอเตอร์ไฟฟ้าจึงไม่มีแรงบิดสตาร์ทและต้องหมุนด้วยมือ แรงแม่เหล็กที่กระทำต่อฟันของโรเตอร์มักจะวางไว้ตรงข้ามกับขั้วสเตเตอร์ เนื่องจากในตำแหน่งนี้ ความต้านทานต่อฟลักซ์แม่เหล็กจะน้อยที่สุด อย่างไรก็ตาม โรเตอร์จะผ่านตำแหน่งนี้ตามความเฉื่อยในช่วงเวลาที่สนามเร้าใจลดลง ที่ เพิ่มขึ้นต่อไปสนามแม่เหล็ก แรงแม่เหล็กกระทำต่อฟันอีกซี่หนึ่งของโรเตอร์ และการหมุนจะดำเนินต่อไป เพื่อให้การทำงานมีเสถียรภาพ โรเตอร์ของมอเตอร์เจ็ทจะต้องมีแรงเฉื่อยสูง
มอเตอร์เจ็ททำงานได้อย่างเสถียรที่ความเร็วการหมุนต่ำประมาณ 100-200 รอบต่อนาทีเท่านั้น พลังของพวกเขามักจะไม่เกิน 10-15 W. ความถี่ในการหมุนของโรเตอร์ถูกกำหนดโดยความถี่ของเครือข่ายจ่าย f และจำนวนฟันของโรเตอร์ Z เนื่องจากในระหว่างครึ่งรอบของการเปลี่ยนแปลงในฟลักซ์แม่เหล็ก โรเตอร์จะหมุน 1/Z รอบ จากนั้นใน 1 นาที ซึ่งมี 60 2 f ครึ่งรอบ มันจะหมุน 60 2 f/Z รอบ ที่ความถี่ไฟฟ้ากระแสสลับ 50 เฮิรตซ์ ความเร็วของโรเตอร์คือ:
![]()
เพื่อเพิ่มแรงบิด จำนวนฟันบนสเตเตอร์จะเพิ่มขึ้น ผลลัพธ์ที่ยิ่งใหญ่ที่สุดสามารถทำได้โดยการสร้างฟันบนสเตเตอร์ให้มากที่สุดเท่าที่จะเป็นไปได้บนโรเตอร์ ในกรณีนี้แรงดึงดูดของแม่เหล็กจะกระทำพร้อมกันไม่ใช่กับฟันคู่หนึ่ง แต่กับฟันทั้งหมดของโรเตอร์และแรงบิดจะเพิ่มขึ้นอย่างมาก ในมอเตอร์ไฟฟ้าดังกล่าว ขดลวดสเตเตอร์ประกอบด้วยขดลวดขนาดเล็กที่พันรอบขอบสเตเตอร์ในช่องว่างระหว่างฟัน เครื่องเล่นแผ่นเสียงไฟฟ้ารุ่นเก่าใช้มอเตอร์ไฟฟ้าที่มีฟัน 77 ซี่บนสเตเตอร์และโรเตอร์ ซึ่งให้ความเร็วการหมุนของจานที่ 78 รอบต่อนาที โรเตอร์เป็นส่วนสำคัญกับดิสก์ที่วางบันทึกไว้ ในการสตาร์ทมอเตอร์ไฟฟ้าคุณต้องดันดิสก์ด้วยนิ้วของคุณ
สเตเตอร์ของมอเตอร์ฝืนตัวเก็บประจุแบบซิงโครนัสไม่แตกต่างจากสเตเตอร์ของมอเตอร์แบบอะซิงโครนัสของตัวเก็บประจุ โรเตอร์ของมอเตอร์ไฟฟ้าสามารถทำจากโรเตอร์ของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสได้โดยการกัดร่องตามจำนวนขั้ว (รูปที่ 3-20) ในกรณีนี้แท่งของกรงกระรอกจะถูกตัดออกบางส่วน ในการผลิตมอเตอร์ไฟฟ้าดังกล่าวในโรงงานที่มีแผ่นโรเตอร์ประทับด้วยส่วนยื่นของเสา ส่วนหนึ่งของแท่งกรงกระรอกจะมีบทบาทในการม้วนสตาร์ท โรเตอร์เริ่มหมุนในลักษณะเดียวกับโรเตอร์ของมอเตอร์เหนี่ยวนำ จากนั้นถูกดึงเข้าสู่การซิงโครไนซ์กับสนามแม่เหล็ก จากนั้นจึงหมุนด้วยความถี่ซิงโครนัส
คุณภาพการทำงานของมอเตอร์ไฟฟ้าแบบคาปาซิเตอร์นั้นขึ้นอยู่กับโหมดการทำงานที่มอเตอร์ไฟฟ้ามีสนามหมุนเป็นวงกลม รูปไข่ของสนามในโหมดซิงโครนัสทำให้เกิดเสียงรบกวน การสั่นสะเทือน และการหยุดชะงักของความสม่ำเสมอในการหมุนที่เพิ่มขึ้น หากสนามหมุนเป็นวงกลมเกิดขึ้นในโหมดอะซิงโครนัส มอเตอร์ไฟฟ้าจะมีแรงบิดเริ่มต้นที่ดี แต่มีช่วงเวลาเข้าและออกจากการซิงโครไนซ์เพียงเล็กน้อย เมื่อสนามวงกลมเลื่อนไปทางความถี่ที่สูงขึ้น แรงบิดเริ่มต้นจะลดลง และโมเมนต์ของการเข้าและออกจากซิงโครนิซึมจะเพิ่มขึ้น ช่วงเวลาที่ยิ่งใหญ่ที่สุดของการเข้าและออกจากการซิงโครไนซ์จะได้รับในกรณีที่สนามหมุนเป็นวงกลมเกิดขึ้นในโหมดซิงโครนัส อย่างไรก็ตาม ในกรณีนี้ แรงบิดเริ่มต้นจะลดลงอย่างมาก เพื่อเพิ่มความต้านทานของขดลวดโรเตอร์ที่ลัดวงจรมักจะเพิ่มขึ้นเล็กน้อย

ข้อเสียของมอเตอร์ฝืนตัวเก็บประจุบางประเภทคือการเกาะของโรเตอร์ซึ่งหมายความว่าเมื่อสตาร์ทโรเตอร์จะไม่หมุน แต่หยุดในบางตำแหน่ง
โดยปกติแล้ว การเกาะติดของโรเตอร์จะเกิดขึ้นในมอเตอร์ไฟฟ้าโดยมีความสัมพันธ์ที่ไม่ดีระหว่างขนาดของรอยบุ๋มและส่วนที่ยื่นออกมาของขั้ว แรงบิดปฏิกิริยาสูงสุดที่มีกำลังไฟฟ้าเพียงเล็กน้อยที่ใช้โดยมอเตอร์ไฟฟ้านั้นได้มาเมื่ออัตราส่วนของส่วนโค้งของขั้ว b p ต่อการแบ่งขั้ว t อยู่ที่ประมาณ 0.5-0.6 และความลึกของความหดหู่ h มากกว่าอากาศ 9-10 เท่า ช่องว่างระหว่างส่วนที่ยื่นออกมาของเสากับสเตเตอร์
คุณสมบัติเชิงบวกของมอเตอร์ฝืนตัวเก็บประจุคือตัวประกอบกำลังสูงซึ่งสูงกว่ามอเตอร์ไฟฟ้าสามเฟสอย่างมีนัยสำคัญซึ่งบางครั้งก็สูงถึง 0.9-0.95 สิ่งนี้อธิบายได้จากข้อเท็จจริงที่ว่าค่าความเหนี่ยวนำของมอเตอร์ตัวเก็บประจุส่วนใหญ่ได้รับการชดเชยโดยความจุของตัวเก็บประจุเป็นส่วนใหญ่
มอเตอร์รีลัคแทนซ์แบบซิงโครนัสเป็นมอเตอร์ซิงโครนัสที่พบบ่อยที่สุด เนื่องจากการออกแบบที่เรียบง่าย ต้นทุนต่ำ และไม่มีหน้าสัมผัสแบบเลื่อน พวกเขาพบการใช้งานในวงจรการสื่อสารแบบซิงโครนัส ในโรงภาพยนตร์เสียง การบันทึกเสียง และการติดตั้งโทรทัศน์
3-9. การใช้มอเตอร์ไฟฟ้าเหนี่ยวนำสามเฟสเป็นมอเตอร์เฟสเดียว
ในทางปฏิบัติมีหลายกรณีที่จำเป็นต้องเชื่อมต่อมอเตอร์ไฟฟ้าสามเฟสกับเครือข่ายเฟสเดียว ก่อนหน้านี้เชื่อกันว่าจำเป็นต้องกรอกลับสเตเตอร์ของมอเตอร์ไฟฟ้า ปัจจุบันมีการพัฒนาและทดสอบแผนงานจำนวนมากสำหรับการเชื่อมต่อมอเตอร์ไฟฟ้าสามเฟสกับเครือข่ายเฟสเดียวโดยไม่มีการเปลี่ยนแปลงใด ๆ กับขดลวดสเตเตอร์
ตัวเก็บประจุถูกใช้เป็นองค์ประกอบเริ่มต้น
ขั้วต่อขดลวดสเตเตอร์ของมอเตอร์ไฟฟ้าสามเฟสมีการกำหนดดังต่อไปนี้: C1—จุดเริ่มต้นของเฟสแรก; C2—จุดเริ่มต้นของระยะที่สอง NW—จุดเริ่มต้นของระยะที่สาม; C4 - สิ้นสุดระยะแรก C5 - สิ้นสุดระยะที่สอง C6—สิ้นสุดระยะที่สาม การกำหนดเหล่านี้จะถูกประทับบนแท็กโลหะที่วางอยู่บนตัวนำตัวนำที่คดเคี้ยว
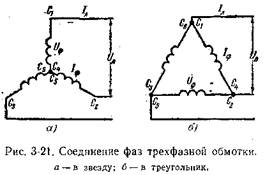
ขดลวดของมอเตอร์ไฟฟ้าสามเฟสสามารถเชื่อมต่อเป็นรูปดาว (รูปที่ 3-21, a) หรือในรูปสามเหลี่ยม (รูปที่ 3-21, b) เมื่อเชื่อมต่อแบบดาว จุดเริ่มต้นหรือจุดสิ้นสุดของทั้งสามเฟสจะเชื่อมต่อกับจุดเดียว และอีก 3 ขั้วที่เหลือจะเชื่อมต่อกับ เครือข่ายสามเฟส- เมื่อเชื่อมต่อกันเป็นรูปสามเหลี่ยม จุดสิ้นสุดของเฟสแรกจะเชื่อมต่อกับจุดเริ่มต้นของเฟสที่สอง ปลายเฟสที่สองถึงจุดเริ่มต้นของเฟสที่สาม และปลายเฟสที่สามเชื่อมต่อกับจุดเริ่มต้นของเฟสแรก จากจุดเชื่อมต่อ จะมีการนำไปเชื่อมต่อมอเตอร์ไฟฟ้ากับเครือข่ายสามเฟส
ในระบบสามเฟส เฟสและแรงดันไฟฟ้าและกระแสเชิงเส้นจะมีความโดดเด่น เมื่อเชื่อมต่อกันเป็นดวงดาว ความสัมพันธ์ต่อไปนี้จะเกิดขึ้นระหว่างกัน:
เมื่อเชื่อมต่อเป็นรูปสามเหลี่ยม
มอเตอร์ไฟฟ้าสามเฟสส่วนใหญ่ผลิตขึ้นสำหรับแรงดันไฟฟ้าเชิงเส้นสองเส้น เช่น 127/220 V หรือ 220/380 V ที่แรงดันไฟฟ้าหลักที่ต่ำกว่า ขดลวดจะเชื่อมต่อเป็นรูปสามเหลี่ยม และที่แรงดันไฟฟ้าที่สูงกว่าจะเชื่อมต่อเป็นรูปดาว สำหรับมอเตอร์ไฟฟ้าดังกล่าวตัวนำเอาต์พุตขดลวดทั้งหกตัวจะถูกนำออกมาที่บอร์ด: ที่หนีบ

อย่างไรก็ตามมีมอเตอร์ไฟฟ้าสำหรับแรงดันไฟฟ้าหลักหนึ่งอันซึ่งขดลวดเชื่อมต่อเป็นรูปดาวหรือสามเหลี่ยมภายในมอเตอร์ไฟฟ้าและมีตัวนำเพียงสามตัวเท่านั้นที่เชื่อมต่อกับแผงขั้วต่อ แน่นอน ในกรณีนี้ อาจเป็นไปได้ที่จะถอดแยกชิ้นส่วนมอเตอร์ไฟฟ้า ปลดการเชื่อมต่อระหว่างเฟส และทำข้อสรุปเพิ่มเติมอีกสามประการ อย่างไรก็ตาม คุณไม่จำเป็นต้องดำเนินการนี้โดยใช้หนึ่งในไดอะแกรมสำหรับเชื่อมต่อมอเตอร์ไฟฟ้ากับเครือข่ายเฟสเดียวตามที่แสดงด้านล่าง
แผนผังของการเชื่อมต่อมอเตอร์ไฟฟ้าสามเฟสกับหกเทอร์มินัลเข้ากับเครือข่ายเฟสเดียวจะแสดงในรูปที่ 1 3-22, อ. ในการทำเช่นนี้มีสองเฟสเชื่อมต่อเป็นอนุกรมและเชื่อมต่อกับเครือข่ายเฟสเดียวและเฟสที่สามเชื่อมต่อแบบขนานรวมถึงองค์ประกอบเริ่มต้น 1 พร้อมสวิตช์ 2 ความต้านทานแบบแอคทีฟหรือตัวเก็บประจุสามารถทำหน้าที่เป็น องค์ประกอบเริ่มต้น ในกรณีนี้ขดลวดที่ใช้งานจะครอบครอง 2/3 ของช่องสเตเตอร์และขดลวดเริ่มต้นจะครอบครอง 1/3 ดังนั้นการพันแบบสามเฟสจึงให้อัตราส่วนของช่องที่ต้องการระหว่างการทำงานและการสตาร์ทของขดลวด ด้วยการเชื่อมต่อนี้ มุมระหว่างขดลวดทำงานและขดลวดสตาร์ทคือ 90° เอล (รูปที่ 3-22, ข).
เมื่อเชื่อมต่อสองเฟสแบบอนุกรม คุณต้องแน่ใจว่าเฟสทั้งสองเปิดอยู่ตาม และไม่ตรงกันข้าม เมื่อ n กับ. ของเฟสที่เชื่อมต่อจะถูกลบออก ดังที่เห็นได้จากแผนภาพในรูป 3-22, a, ปลายของเฟสที่สองและสาม C 5 และ C 6 เชื่อมต่อกับจุดร่วม
มอเตอร์ไฟฟ้าสามเฟสยังสามารถใช้เป็นมอเตอร์ตัวเก็บประจุได้ตามแผนภาพในรูป 3-23 ด้วยตัวเก็บประจุทำงานหนึ่งตัว 1 หรือกับการทำงาน 1 และตัวเก็บประจุเริ่มต้น 2 ด้วยโครงร่างการเชื่อมต่อนี้ ความจุของตัวเก็บประจุทำงาน μF ถูกกำหนดโดยสูตร:
โดยที่ I คือกระแสไฟที่กำหนดของมอเตอร์ไฟฟ้า A; U—แรงดันไฟหลัก, V.
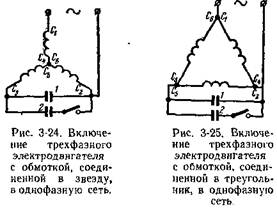
มอเตอร์ไฟฟ้าสามเฟสที่มีสามเทอร์มินัลและขดลวดสเตเตอร์ที่เชื่อมต่อกับดาวเชื่อมต่อกับเครือข่ายเฟสเดียวตามแผนภาพในรูป 3-24. ในกรณีนี้ความจุของตัวเก็บประจุทำงานจะถูกกำหนดโดยสูตร
แรงดันตัวเก็บประจุ U 1 = 1.3 U.
มอเตอร์ไฟฟ้าสามเฟสที่มีสามเทอร์มินัลและขดลวดสเตเตอร์ที่เชื่อมต่อเป็นรูปสามเหลี่ยมเชื่อมต่อกับเครือข่ายเฟสเดียวตามแผนภาพในรูป 3-25. ความจุของตัวเก็บประจุทำงานถูกกำหนดโดยสูตร
แรงดันไฟฟ้าของตัวเก็บประจุ U=1.15 V.
ในทั้งสามกรณีความจุ ตัวเก็บประจุเริ่มต้นสามารถประมาณได้จากความสัมพันธ์
![]()
เมื่อเลือกวงจรเชื่อมต่อคุณควรได้รับคำแนะนำจากแรงดันไฟฟ้าที่ออกแบบมอเตอร์ไฟฟ้าสามเฟสและแรงดันไฟฟ้าของเครือข่ายเฟสเดียว ในกรณีนี้คือแรงดันไฟฟ้าเฟสของไฟสามเฟส
ตัวอย่าง.มอเตอร์ไฟฟ้า 3 เฟส กำลัง 250 W แรงดันไฟฟ้า 127/220 V พร้อมด้วย จัดอันดับปัจจุบัน 2/1.15 A ต้องต่อเข้ากับโครงข่ายเฟสเดียวที่มีแรงดันไฟฟ้า 220 V.
เมื่อใช้แผนภาพในรูป ความจุตัวเก็บประจุทำงาน 3-24:
![]()
แรงดันไฟฟ้าข้ามตัวเก็บประจุ U 1 = 1.3 220 = 286 V.
เริ่มต้นความจุของตัวเก็บประจุ
เมื่อใช้มอเตอร์ไฟฟ้าสามเฟสเป็นมอเตอร์ไฟฟ้าเฟสเดียว กำลังจะลดลงเหลือ 50% และเมื่อใช้เป็นมอเตอร์ไฟฟ้าแบบคาปาซิเตอร์เฟสเดียว ก็จะลดลงเหลือ 70% ของกำลังพิกัดของไฟฟ้าสามเฟส เครื่องยนต์.
เอ็น.วี. Vinogradov, Yu.N. วิโนกราดอฟ
วิธีการคำนวณและสร้างมอเตอร์ไฟฟ้าด้วยตัวเอง
มอสโก 1974
พื้นที่ใช้งาน.ใช้มอเตอร์อะซิงโครนัสกำลังต่ำ (15 - 600 W) อุปกรณ์อัตโนมัติและเครื่องใช้ไฟฟ้าในครัวเรือนสำหรับขับพัดลม ปั๊ม และอุปกรณ์อื่นๆ ที่ไม่ต้องการการควบคุมความเร็ว ไมโครมอเตอร์เฟสเดียวมักจะใช้ในเครื่องใช้ในครัวเรือนและอุปกรณ์อัตโนมัติ เนื่องจากอุปกรณ์และอุปกรณ์เหล่านี้มักจะใช้พลังงานจากเครือข่าย AC เฟสเดียว
หลักการทำงานและอุปกรณ์ มอเตอร์เฟสเดียว. ขดลวดสเตเตอร์ของมอเตอร์เฟสเดียว (รูปที่ 4.60, ก)ตั้งอยู่ในร่องซึ่งมีขนาดประมาณสองในสามของเส้นรอบวงสเตเตอร์ซึ่งสอดคล้องกับเสาคู่หนึ่ง ผลที่ตามมา
(ดูบทที่ 3) การกระจายตัวของ MMF และการเหนี่ยวนำในช่องว่างอากาศใกล้เคียงกับไซน์ซอยด์ นับตั้งแต่ที่คดเคี้ยวผ่านไป กระแสสลับ,MDS จะเต้นเป็นจังหวะตามเวลาของความถี่เครือข่าย การเหนี่ยวนำที่จุดใดก็ได้ในช่องว่างอากาศ
บีเอ็กซ์ = ใน m sinωtcos (πх/τ).
ดังนั้นในมอเตอร์แบบเฟสเดียว ขดลวดสเตเตอร์จะสร้างฟลักซ์คงที่ซึ่งแปรผันตามเวลา และไม่ใช่ฟลักซ์การหมุนแบบวงกลม ดังเช่นในมอเตอร์สามเฟสที่มีการจ่ายแบบสมมาตร
เพื่อให้การวิเคราะห์คุณสมบัติของมอเตอร์เฟสเดียวง่ายขึ้นให้เรานำเสนอ (4.99) ในรูปแบบ
B x = 0.5V t บาป (ωt - πх/τ) + 0.5V t บาป (ωt + πх/τ).
นั่นคือเราแทนที่การไหลแบบเป็นจังหวะคงที่ด้วยผลรวมของสนามวงกลมที่เหมือนกันซึ่งหมุนไปในทิศทางตรงกันข้ามและมีความถี่การหมุนเท่ากัน: n 1pr = n 1 รอบ = n 1. เนื่องจากคุณสมบัติของมอเตอร์แบบอะซิงโครนัสที่มีสนามหมุนเป็นวงกลมถูกกล่าวถึงโดยละเอียดในมาตรา 4.7 - 4.12 การวิเคราะห์คุณสมบัติของมอเตอร์แบบเฟสเดียวจึงสามารถลดลงได้โดยพิจารณาถึงการทำงานร่วมกันของสนามหมุนแต่ละสนาม กล่าวอีกนัยหนึ่งมอเตอร์เฟสเดียวสามารถแสดงเป็นมอเตอร์ที่เหมือนกันสองตัวซึ่งโรเตอร์เชื่อมต่อกันอย่างแน่นหนา (รูปที่ 4.60, b) โดยมีสนามแม่เหล็กและแรงบิดที่สร้างขึ้นโดยพวกมันหมุนไปในทิศทางตรงกันข้าม มที่ มอ๊าก สนามที่มีทิศทางการหมุนตรงกับทิศทางการหมุนของโรเตอร์เรียกว่าโดยตรง สนาม ทิศทางย้อนกลับ - ย้อนกลับหรือผกผัน
สมมติว่าทิศทางการหมุนของโรเตอร์เกิดขึ้นพร้อมกับทิศทางของสนามหมุนอย่างใดอย่างหนึ่ง เช่น กับ n ave จากนั้นการเลื่อนของโรเตอร์สัมพันธ์กับการไหล เอฟฯลฯ
s pr = (n 1pr - n 2)/n 1pr = (n 1 - n 2)/n 1 = 1 - n 2 /n 1.
โรเตอร์สลิปสัมพันธ์กับการไหล F arr
s arr = (n 1arr + n 2)/n 1arr = (n 1 + n 2)/n 1 = 1 + n 2 /n 1.
จาก (4.100) และ (4.101) ตามนั้น
ส o6p = 1 + n 2 /n 1 = 2 - สพีอาร์.
ช่วงเวลาแม่เหล็กไฟฟ้า มที่ มการย้อนกลับที่สร้างโดยสนามไปข้างหน้าและย้อนกลับนั้นมุ่งไปในทิศทางตรงกันข้าม และผลลัพธ์ของแรงบิดของมอเตอร์แบบเฟสเดียว มการตัดจะเท่ากับความแตกต่างของแรงบิดที่ความเร็วโรเตอร์เท่ากัน
ในรูป 4.61 แสดงการพึ่งพา M = f(s)สำหรับมอเตอร์เฟสเดียว เมื่อพิจารณาจากรูปเราสามารถสรุปได้ดังต่อไปนี้:
ก) มอเตอร์เฟสเดียวไม่มีแรงบิดสตาร์ท มันหมุนไปในทิศทางที่มันขับเคลื่อน แรงภายนอก- ข) ความเร็วในการหมุนของมอเตอร์เฟสเดียวที่รอบเดินเบาน้อยกว่าความเร็วของการหมุน มอเตอร์สามเฟสเนื่องจากการมีอยู่ของแรงบิดเบรกที่เกิดจากสนามถอยหลัง
ค) ลักษณะเฉพาะด้านสมรรถนะของมอเตอร์เฟสเดียวแย่กว่าลักษณะเฉพาะของมอเตอร์สามเฟส มันมีการลื่นเพิ่มขึ้นเมื่อ โหลดจัดอันดับประสิทธิภาพที่ต่ำกว่า, ความสามารถในการโอเวอร์โหลดที่ต่ำกว่าซึ่งอธิบายได้ด้วยการมีฟิลด์ย้อนกลับ
d) กำลังของมอเตอร์เฟสเดียวคือประมาณ 2/3 ของกำลังของมอเตอร์สามเฟสที่มีขนาดเท่ากัน เนื่องจากในมอเตอร์เฟสเดียวขดลวดทำงานจะใช้เพียง 2/3 ของช่องสเตเตอร์ กรอกช่องสเตเตอร์ทั้งหมด
เนื่องจากในกรณีนี้ ค่าสัมประสิทธิ์การพันขดลวดมีขนาดเล็ก การใช้ทองแดงจะเพิ่มขึ้นประมาณ 1.5 เท่า ในขณะที่กำลังเพิ่มขึ้นเพียง 12% เท่านั้น
อุปกรณ์สตาร์ท.เพื่อให้ได้แรงบิดเริ่มต้น มอเตอร์เฟสเดียวมีขดลวดสตาร์ทเลื่อน 90 องศาไฟฟ้าสัมพันธ์กับขดลวดใช้งานหลัก ในช่วงเริ่มต้น ขดลวดเริ่มต้นจะเชื่อมต่อกับเครือข่ายผ่านองค์ประกอบการเปลี่ยนเฟส - ความจุหรือความต้านทานแบบแอคทีฟ หลังจากที่เครื่องยนต์เร่งความเร็วเสร็จแล้ว ขดลวดสตาร์ทจะถูกปิด ในขณะที่เครื่องยนต์ยังคงทำงานแบบเฟสเดียว เนื่องจากการม้วนสตาร์ทใช้งานได้เท่านั้น เวลาอันสั้นทำจากลวดที่มีหน้าตัดเล็กกว่าลวดที่ใช้งานและวางอยู่ในร่องจำนวนน้อยกว่า
ให้เราพิจารณารายละเอียดเกี่ยวกับกระบวนการเริ่มต้นเมื่อใช้ความจุ C เป็นองค์ประกอบการเปลี่ยนเฟส (รูปที่ 4.62, a) เมื่อเริ่มคดเคี้ยว ปแรงดันไฟฟ้า
Ú
1p = Ú
1 - Ú
ค= Ú
1 +จิ 1ป เอ็กซ์ ซีกล่าวคือ มีการเลื่อนเฟสโดยสัมพันธ์กับแรงดันไฟหลัก ยู 1 ติดอยู่กับขดลวดทำงาน ร- ดังนั้นเวกเตอร์ปัจจุบันในการทำงาน ฉัน 1p และตัวเรียกใช้งาน ฉันขดลวด 1p จะเลื่อนไปเป็นเฟสตามมุมที่กำหนด ด้วยการเลือกความจุของตัวเก็บประจุแบบเปลี่ยนเฟสในลักษณะใดลักษณะหนึ่ง เป็นไปได้ที่จะได้รับโหมดการทำงานเมื่อเริ่มต้นระบบซึ่งใกล้เคียงกับความสมมาตร (รูปที่ 4.62, b) เช่น เพื่อให้ได้สนามการหมุนแบบวงกลม ในรูป 4.62 แสดงการขึ้นต่อกัน M = f(s)สำหรับเครื่องยนต์ที่เปิดการม้วนสตาร์ท (เส้นโค้ง 1) และปิด (เส้นโค้ง 2) เครื่องยนต์สตาร์ทเป็นชิ้นส่วน เกี่ยวกับลักษณะ 1; ตรงจุด ขขดลวดสตาร์ทถูกปิด จากนั้นเครื่องยนต์จะทำงานเป็นบางส่วน สโอลักษณะ 2.
เมื่อเปิดการม้วนที่สองดีขึ้นอย่างมาก ลักษณะทางกลมอเตอร์ ในบางกรณีใช้มอเตอร์แบบเฟสเดียวซึ่งมีขดลวด A และ B
เปิดอยู่ตลอดเวลา (รูปที่ 4.63, ก) มอเตอร์ดังกล่าวเรียกว่ามอเตอร์ตัวเก็บประจุ
ขดลวดทั้งสองของมอเตอร์ตัวเก็บประจุมักจะครอบครอง หมายเลขเดียวกันสล็อตและมีพลังเท่ากัน เมื่อสตาร์ทมอเตอร์ตัวเก็บประจุเพื่อเพิ่มแรงบิดเริ่มต้นแนะนำให้เพิ่มความจุ C p + C p หลังจากเร่งความเร็วมอเตอร์ตามคุณสมบัติ 2 (รูปที่ 4.63, b) และลดกระแสซึ่งเป็นส่วนหนึ่งของตัวเก็บประจุ Cn ถูกปิดเพื่อให้ในโหมดพิกัด (เมื่อกระแสไฟฟ้าของมอเตอร์น้อยลงกว่าตอนสตาร์ท) จะเพิ่มความจุไฟฟ้าและรับรองการทำงานของเครื่องยนต์ในสภาวะที่ใกล้เคียงกับการทำงานในสนามหมุนเป็นวงกลม ในกรณีนี้ เครื่องยนต์จะทำงานที่ลักษณะเฉพาะ 1
มอเตอร์คาปาซิเตอร์มีค่า cos φ สูง ข้อเสียของมันคือมวลและขนาดที่ค่อนข้างใหญ่ของตัวเก็บประจุตลอดจนการเกิดกระแสที่ไม่ใช่ไซน์ซอยด์เมื่อแรงดันไฟฟ้าผิดเพี้ยนซึ่งในบางกรณีนำไปสู่ ผลกระทบที่เป็นอันตรายบนสายสื่อสาร
ภายใต้สภาวะการสตาร์ทง่าย (แรงบิดโหลดน้อยในช่วงเวลาสตาร์ท) จะใช้มอเตอร์ที่มีความต้านทานในการสตาร์ท ร(รูปที่ 4.64, ก) ความพร้อมใช้งาน ความต้านทานที่ใช้งานอยู่ในวงจรเริ่มต้นของขดลวดให้การเปลี่ยนเฟสเล็ก φ p ระหว่างแรงดันและกระแสในขดลวดนี้ (รูปที่ 4.64, b) มากกว่าการเปลี่ยนเฟส φ p ในขดลวดทำงาน ในเรื่องนี้กระแสในการทำงานและ เริ่มขดลวดเปลี่ยนเป็นเฟสด้วยมุม φ p - φ p และสร้างสนามหมุนที่ไม่สมมาตร (วงรี) เนื่องจากแรงบิดเริ่มต้นเกิดขึ้น มอเตอร์ที่มีความต้านทานการสตาร์ทมีความน่าเชื่อถือในการทำงานและผลิตในปริมาณมาก ความต้านทานเริ่มต้นถูกสร้างไว้ในตัวเรือนมอเตอร์และระบายความร้อนด้วยอากาศเดียวกับที่ทำให้มอเตอร์เย็นลงทั้งหมด
ไมโครมอเตอร์เฟสเดียวพร้อมเสาหุ้มฉนวนในมอเตอร์เหล่านี้ขดลวดสเตเตอร์ที่เชื่อมต่อกับเครือข่ายมักจะเข้มข้นและติดตั้งบนเสาเด่น (รูปที่ 4.65, a) ซึ่งแผ่นงานจะถูกประทับตราร่วมกับสเตเตอร์ ที่แต่ละขั้ว ปลายด้านหนึ่งถูกหุ้มไว้ด้วยขดลวดเสริมที่ประกอบด้วยการหมุนลัดวงจรหนึ่งรอบหรือมากกว่านั้น ซึ่งป้องกันตั้งแต่ 1/5 ถึง 1/2 ของส่วนโค้งของขั้ว โรเตอร์ของมอเตอร์เป็นแบบกรงกระรอกทั่วไป
ฟลักซ์แม่เหล็กของเครื่องที่สร้างขึ้นโดยขดลวดสเตเตอร์ (ฟลักซ์ขั้ว) สามารถแสดงเป็นผลรวมของสององค์ประกอบ (รูปที่ 4.65, b) F p = F p1 + F p2 โดยที่ F p1 คือฟลักซ์ที่ผ่านชิ้นส่วน ของเสาที่ไม่ลัดวงจรด้วยการบิดแบบนี้ F p2 คือฟลักซ์ที่ไหลผ่านส่วนของขั้วที่หุ้มด้วยคอยล์ลัดวงจร
กระแส Фп1 และ Фп2 ไหลผ่านส่วนต่างๆ ของชิ้นส่วนเสา นั่นคือ พวกมันถูกแทนที่ในอวกาศด้วยมุม β นอกจากนี้ พวกมันยังถูกเลื่อนเฟสโดยสัมพันธ์กับ MMF เอฟ n ขดลวดสเตเตอร์ในมุมที่ต่างกัน - γ 1 และ γ 2 สิ่งนี้อธิบายได้จากข้อเท็จจริงที่ว่าแต่ละขั้วของมอเตอร์ที่อธิบายไว้สามารถพิจารณาได้ในการประมาณครั้งแรกในฐานะหม้อแปลงไฟฟ้า ขดลวดปฐมภูมิคือขดลวดสเตเตอร์ และขดลวดทุติยภูมิเป็นการหมุนลัดวงจร ฟลักซ์ของขดลวดสเตเตอร์จะทำให้เกิดแรงเคลื่อนไฟฟ้าในขดลวดที่ลัดวงจร อีถึง (รูปที่ 4.65, c) ซึ่งเป็นผลมาจากกระแสที่เกิดขึ้น ฉันเค และเอ็มดีเอส เอฟ k พับด้วย MDS เอฟขดลวดสเตเตอร์ ส่วนประกอบกระแสไฟฟ้าที่เกิดปฏิกิริยา ฉัน k ลดการไหล Ф p2 และกระแสที่ใช้งานอยู่จะเลื่อนไปในเฟสที่สัมพันธ์กับ MMF เอฟ n เนื่องจากการไหล Ф p1 ไม่ครอบคลุมการหมุนที่ลัดวงจร มุม γ 1 จึงมีค่าค่อนข้างน้อย (4-9°) - โดยประมาณเท่ากับมุมการเปลี่ยนเฟสระหว่างการไหลของหม้อแปลงและ MMF ของกระแสหลัก คดเคี้ยวในโหมดไม่มีโหลด มุม γ 2 มีขนาดใหญ่กว่ามาก (ประมาณ 45°) กล่าวคือ เหมือนกับในหม้อแปลงที่มีขดลวดทุติยภูมิลัดวงจร (เช่น ในหม้อแปลงวัดกระแส) สิ่งนี้อธิบายได้จากข้อเท็จจริงที่ว่าการสูญเสียกำลังซึ่งขึ้นอยู่กับมุม γ 2 นั้น ไม่เพียงถูกกำหนดโดยการสูญเสียพลังงานแม่เหล็กในเหล็กเท่านั้น แต่ยังรวมถึงการสูญเสียทางไฟฟ้าในการเลี้ยวที่ลัดวงจรด้วย
ข้าว. 4.65. ออกแบบไดอะแกรมมอเตอร์เฟสเดียวพร้อมเสาสีเทาและของมัน
แผนภาพเวกเตอร์:
1
- สเตเตอร์; 2 -
ขดลวดสเตเตอร์; 3 -
ลัดวงจร
เปลี่ยน; 4 -
โรเตอร์; 5
- เสา
กระแส Фп1 และ Фп2 แทนที่ในอวกาศด้วยมุม β และเลื่อนเฟสในเวลาด้วยมุม γ = γ 2 - γ l ทำให้เกิดสนามแม่เหล็กหมุนเป็นรูปวงรี (ดูบทที่ 3) ซึ่งสร้างแรงบิดที่กระทำต่อโรเตอร์ของ มอเตอร์ไปในทิศทางจากชิ้นขั้วแรกที่ไม่ครอบคลุมโดยการหมุนลัดวงจรไปยังปลายที่สอง (ตามการสลับฟลักซ์สูงสุดของ "เฟส")
เพื่อเพิ่มแรงบิดสตาร์ทของเครื่องยนต์ที่ต้องการโดยนำสนามหมุนเข้าใกล้วงกลมมากขึ้น วิธีต่างๆ: มีการติดตั้งตัวสับแม่เหล็กระหว่างชิ้นส่วนขั้วของขั้วที่อยู่ติดกัน ซึ่งช่วยเสริมการเชื่อมต่อแม่เหล็กระหว่างขดลวดหลักและการหมุนที่ลัดวงจร และปรับปรุงรูปร่างของสนามแม่เหล็กในช่องว่างอากาศ เพิ่มช่องว่างอากาศใต้ส่วนปลายซึ่งไม่ครอบคลุมโดยการลัดวงจร ใช้การหมุนลัดวงจรสองครั้งขึ้นไปบนปลายด้านหนึ่งที่มีมุมครอบคลุมต่างกัน นอกจากนี้ยังมีมอเตอร์ที่ไม่มีการหมุนลัดวงจรบนเสา แต่มีระบบแม่เหล็กแบบอสมมาตร: การกำหนดค่าที่แตกต่างกันแยกส่วนของเสาและช่องว่างอากาศต่างๆ มอเตอร์ดังกล่าวมีแรงบิดสตาร์ทต่ำกว่ามอเตอร์ที่มีขั้วสีเทา แต่ประสิทธิภาพจะสูงกว่า เนื่องจากไม่มีการสูญเสียพลังงานในการลัดวงจร
การออกแบบมอเตอร์ที่มีเสาสีเทาที่พิจารณาแล้วจะไม่สามารถย้อนกลับได้ หากต้องการใช้การถอยหลังในเครื่องยนต์ดังกล่าว แทนที่จะใช้การลัดวงจร จะใช้คอยล์ บี1 บี2 บี3และ ที่ 4(รูปที่ 4.65, วี) แต่ละอันครอบคลุมครึ่งเสา การลัดวงจรคู่คอยล์ ใน 1และ ที่ 4หรือ ที่ 2และ ที่ 3,คุณสามารถป้องกันขั้วหนึ่งหรืออีกครึ่งหนึ่งได้และเปลี่ยนทิศทางการหมุนของสนามแม่เหล็กและโรเตอร์
มอเตอร์ที่มีเสาสีเทามีข้อเสียที่สำคัญหลายประการ: มีขนาดค่อนข้างใหญ่ ขนาดและมวล cos ต่ำ φ µ 0.4 ÷ 0.6; ประสิทธิภาพต่ำ η = 0.25 τ 0.4 เนื่องจากการสูญเสียจำนวนมากในขดลวดลัดวงจร แรงบิดสตาร์ทน้อย เป็นต้น ข้อดีของเครื่องยนต์คือการออกแบบที่เรียบง่ายและส่งผลให้มีความน่าเชื่อถือสูงในการทำงาน เนื่องจากสเตเตอร์ไม่มีฟัน เสียงมอเตอร์จึงไม่มีนัยสำคัญ ดังนั้นจึงมักใช้ในอุปกรณ์สำหรับสร้างเสียงเพลงและคำพูด