Индуктивный датчик приближения. Внешний вид
В промышленной электронике индуктивные, и другие датчики применяются очень широко.
Статья будет обзорной (если хотите, научно-популярной). Приведены реальные инструкции к датчикам и ссылки на примеры.
Виды датчиков
Итак, что вообще такое датчик. Датчик – это устройство, которое выдаёт определённый сигнал при наступлении какого-либо определённого события. Иначе говоря, датчик при определённом условии активируется, и на его выходе появляется аналоговый (пропорциональный входному воздействию) или дискретный (бинарный, цифровой, т.е. два возможных уровня) сигнал.
Точнее можем посмотреть в Википедии: Датчик (сенсор, от англ. sensor) - понятие в системах управления, первичный преобразователь, элемент измерительного, сигнального, регулирующего или управляющего устройства системы, преобразующий контролируемую величину в удобный для использования сигнал.
Там же и много другой информации, но у меня своё, инженерно-электронно-прикладное, видение вопроса.
Датчиков бывает великое множество. Перечислю лишь те разновидности датчиков, с которыми приходится сталкиваться электрику и электронщику.
Индуктивные. Активируется наличием металла в зоне срабатывания. Другие названия – датчик приближения, датчик положения, индукционный, датчик присутствия, индуктивный выключатель, бесконтактный датчик или выключатель. Смысл один, и не надо путать. По-английски пишут “proximity sensor”. Фактически это – датчик металла.
Оптические. Другие названия – фотодатчик, фотоэлектрический датчик, оптический выключатель. Такие применяются и в быту, называются “датчик освещённости”
Емкостные. Срабатывает на наличие практически любого предмета или вещества в поле активности.
Давления . Давления воздуха или масла нет – сигнал на контроллер или рвёт . Это если дискретный. Может быть датчик с токовым выходом, ток которого пропорционален абсолютному давлению либо дифференциальному.
Концевые выключатели (электрический датчик). Это обычный пассивный выключатель, который срабатывает, когда на него наезжает или давит объект.
Датчики могут называться также сенсорами или инициаторами .
Пока хватит, перейдём к теме статьи.
Индуктивный датчик является дискретным. Сигнал на его выходе появляется, когда в заданной зоне присутствует металл.
В основе работы датчика приближения лежит генератор с катушкой индуктивности. Отсюда и название. Когда в электромагнитном поле катушки появляется металл, это поле резко меняется, что влияет на работу схемы.

Поле индукционного датчика. Металлическая пластина меняет резонансную частоту колебательного контура

Схема индуктивного npn датчика. Приведена функциональная схема, на которой: генератор с колебательным контуром, пороговое устройство (компаратор), выходной транзистор NPN, защитные стабилитрон и диоды
Большинство картинок в статье – не мои, в конце можно будет скачать источники.
Применение индуктивного датчика
Индуктивные датчики приближения применяются широко в промышленной автоматике, чтобы определить положение той или иной части механизма. Сигнал с выхода датчика может поступать на вход контроллера, преобразователя частоты, реле, пускателя, и так далее. Единственное условие – соответствие по току и напряжению.
А что там свежего в группе ВК СамЭлектрик.ру ?
Подписывайся, и читай статью дальше:
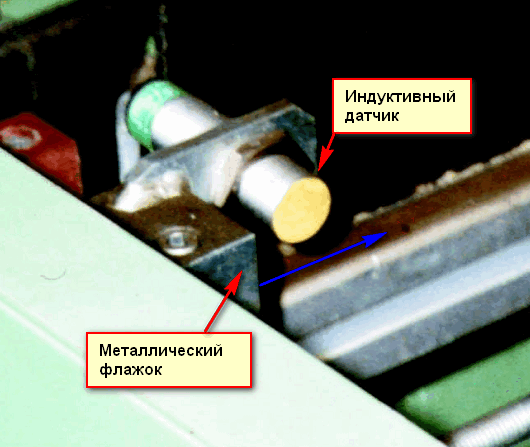
Работа индуктивного датчика. Флажок движется вправо, и когда достигает зоны чувствительности датчика, датчик срабатывает.
Кстати, производители датчиков предупреждают, что не рекомендуется подключать непосредственно на выход датчика лампочку накаливания. О причинах я уже писал – .
Характеристики индуктивных датчиков
Чем отличаются датчики.
Почти всё, что сказано ниже, относится не только к индуктивным, но и к оптическим и ёмкостным датчикам .
Конструкция, вид корпуса
Тут два основных варианта – цилиндрический и прямоугольный . Другие корпуса применяются крайне редко. Материал корпуса – металл (различные сплавы) или пластик.
Диаметр цилиндрического датчика
Основные размеры – 12 и 18 мм . Другие диаметры (4, 8, 22, 30 мм) применяются редко.
Чтобы закрепить датчик 18 мм, нужны 2 ключа на 22 или 24 мм.
Расстояние переключения (рабочий зазор)
Это то расстояние до металлической пластины, на котором гарантируется надёжное срабатывание датчика. Для миниатюрных датчиков это расстояние – от 0 до 2 мм, для датчиков диаметром 12 и 18 мм – до 4 и 8 мм, для крупногабаритных датчиков – до 20…30 мм.
Количество проводов для подключения
Подбираемся к схемотехнике.
2-проводные. Датчик включается непосредственно в цепь нагрузки (например, катушка пускателя). Так же, как мы включаем дома свет. Удобны при монтаже, но капризны к нагрузке. Плохо работают и при большом, и при маленьком сопротивлении нагрузки.

2-проводный датчик. Схема включения
Нагрузку можно подключать в любой провод, для постоянного напряжения важно соблюдать полярность. Для датчиков, рассчитанных на работу с переменным напряжением – не играет роли ни подключение нагрузки, ни полярность. Можно вообще не думать, как их подключать. Главное – обеспечить ток.
3-проводные. Наиболее распространены. Есть два провода для питания, и один – для нагрузки. Подробнее расскажу отдельно.
4- и 5-проводные. Такое возможно, если используется два выхода на нагрузку (например, PNP и NPN (транзисторные), или переключающие (реле). Пятый провод – выбор режима работы или состояния выхода.
Виды выходов датчиков по полярности
У всех дискретных датчиков может быть только 3 вида выходов в зависимости от ключевого (выходного) элемента:
Релейный. Тут всё понятно. Реле коммутирует необходимое напряжение либо один из проводов питания. При этом обеспечивается полная гальваническая развязка от схемы питания датчика, что является основным достоинством такой схемы. То есть, независимо от напряжения питания датчика, можно включать/выключать нагрузку с любым напряжением. Используется в основном в крупногабаритных датчиках.
Транзисторный PNP. Это – PNP датчик. На выходе – транзистор PNP, то есть коммутируется “плюсовой” провод. К “минусу” нагрузка подключена постоянно.
Транзисторный NPN. На выходе – транзистор NPN, то есть коммутируется “минусовой”, или нулевой провод. К “плюсу” нагрузка подключена постоянно.
Можно чётко усвоить разницу, понимая принцип действия и схемы включения транзисторов. Поможет такое правило: Куда подключен эмиттер, тот провод и коммутируется. Другой провод подключен к нагрузке постоянно.
Ниже будут даны схемы включения датчиков , на которых будет хорошо видно эти отличия.
Виды датчиков по состоянию выхода (НЗ и НО)
Какой бы ни был датчик, один из основных его параметров – электрическое состояние выхода в тот момент, когда датчик не активирован (на него не производится какое-либо воздействие).
Выход в этот момент может быть включен (на нагрузку подается питание) либо выключен. Соответственно, говорят – нормально закрытый (нормально замкнутый, НЗ) контакт либо нормально открытый (НО) контакт. В иностранной аппаратуре, соответственно – NС и NО.
То есть, главное, что надо знать про транзисторные выходы датчиков – то, что их может быть 4 разновидности, в зависимости от полярности выходного транзистора и от исходного состояния выхода:
- PNP NO
- PNP NC
- NPN NO
- NPN NC
Положительная и отрицательная логика работы
Это понятие относится скорее к исполнительным устройствам, которые подключаются к датчикам (контроллеры, реле).
ОТРИЦАТЕЛЬНАЯ или ПОЛОЖИТЕЛЬНАЯ логика относится к уровню напряжения, который активизирует вход.
ОТРИЦАТЕЛЬНАЯ логика: вход контроллера активизируется (логическая “1”) при подключении к ЗЕМЛЕ. Клемму S/S контроллера (общий провод для дискретных входов) при этом необходимо соединить с +24 В=. Отрицательная логика используется для датчиков типа NPN.
ПОЛОЖИТЕЛЬНАЯ логика: вход активизируется при подключении к +24 В=. Клемму контроллера S/S необходимо соединить с ЗЕМЛЕЙ. Используйте положительную логику для датчиков типа PNP. Положительная логика применяется чаще всего.
Существуют варианты различных устройств и подключения к ним датчиков, спрашивайте в комментариях, вместе подумаем.
Продолжение статьи – . Во второй части даны реальные схемы и рассмотрено практическое применение различных типов датчиков с транзисторным выходом.
Предлагаем Вам ознакомиться с физическими основами работы производства компании RDP Electronics Ltd (United Kingdom), с их основными параметрами, преимуществами и сферами применения.
Сам термин LVDT (Linear Variable Differential Transformer) - означает линейный дифференциальный трансформатор с переменным коэффициентом передачи.
Рассмотрим принцип работы датчиков на LVDT технологии.
Первичная возбуждающая обмотка
Вторичная обмотка 1
Вторичная обмотка 2
Результирующий сигнал от суммы вторичных обмоток
В принципе имеется две схемы работы - с выходным напряжением и выходным током.
|
Схема работы с выходным током (4-20мА) |
 |
Рассмотрим более детально сам процесс измерения перемещения.
Датчик перемещения, работающий по технологии LVDT, состоит из трех обмоток трансформатора - одной первичной и двух вторичных. Степень передачи тока между первичной и двумя вторичными обмотками определяется положением подвижного магнитного сердечника, штока. Вторичные обмотки трансформатора соединены в противофазе.
При нахождении штока в середине трансформатора, напряжение на двух вторичных обмотках равны по амплитуде, а т. к. они соединены противофазно, суммарное напряжение на выходе равно нулю - перемещения нет.
Если шток перемещается от серединного положения в какую либо сторону - происходит увеличение напряжения в одной из вторичных обмоток и уменьшение в другой. В результате суммарное напряжение будет не нулевым - датчик будет фиксировать смещение штока.
Соотношение выходной фазы сигнала по сравнению с фазой возбуждающего сигнала дает возможность электронике понять, в какой части обмотки находится в данный момент шток.
Основная особенность принципа работы индуктивных датчиков перемещения состоит в том, что прямой электрический контакт между чувствительным элементом и трансформатором отсутствует (связь осуществляется через магнитное поле), что дает пользователям абсолютные данные по перемещению, теоретически бесконечную точность разрешения и очень долгий срок службы датчика.
Особенности схемы работы с выходным током - т. к. цепь генератор/демодулятор встроена в сам датчик перемещения и питается от выходного тока 4-20 мА, то нет необходимости во внешнем оборудовании для формирования сигнала.
Особенности схемы работы с выходным напряжением - цепь генератор/демодулятор, встроенная в датчик перемещения обеспечивает возбуждение и преобразует сигнал обратной связи в напряжение постоянного тока. При этом так же не требуется внешнее оборудование для формирования сигнала.
Особенности измерения выходного сигнала.
1) Если выходное напряжение измеряется не фазочувствительным (среднеквадратичным) вольтметром, то отклонение штока в любую сторону от центрального положения в трансформаторе датчика будет соответствовать увеличению выходного напряжения.

Заметим, что кривая не касается горизонтальной оси. Это происходит из-за остаточного выходного напряжения.
2) Если используется фазочувствительная демодуляция, то по выходному сигналу можно судить, в какой части трансформатора находится шток в данный момент.

Для формирования сигнала всегда используется фазочувствительная демодуляция, т.к. это исключает влияние на выходной сигнал остаточного выходного напряжения и позволяет пользователю знать положение штока в трансформаторе.
Если мы рассмотрим выходную кривую вне механического диапазона типичного LVDT датчика, то можно заметить, что на краях диапазона кривая изгибается. Это значит, что механический диапазон существенно шире линейного участка работы.

При калибровке датчика, важно, что электрическая нулевая точка используется в качестве ссылки, и что датчик используется в пределах ± FS (полного диапазона) вокруг электрического нулевом положения.
Если проводить калибровку не беря за основу точку ноля вольт, одно из положений полного диапазона будет за пределами линейного диапазона и, следовательно, может привести к ошибке линейности.
Типы индуктивных датчиков перемещения
Несвязанные преобразователи, которые имеют якорь, который отделен от тела корпуса. Части датчика должны быть установлены таким образом, что якорь не прикасался к внутренней трубке корпуса. Сделав это, можно получить абсолютное отсутствие трения при движении чувствительного элемента датчика.

Монолитные преобразователи, которые имеют тефлоновый подшипник, который направляет якорь (шток) по внутренней трубке.

Монолитные преобразователи с возвратной пружиной, которая толкает якорь (шток) наружу.

Внутреннее строение типичного индуктивного датчика перемещения LVDT

Преимущества индуктивных датчиков перемещения LVDT
1. Преимущества над линейными потенциометрами (POTS).
- Не имеют контакта корпуса и внутренних деталей с чувствительным элементом, что означает, что нет никакого износа при движении штока. POTS датчики имеют контакт с чувствительным элементом и могут быстро изнашиваются, особенно под воздействием вибрации.
- Можно легко обеспечить защиту от влаги и пыли на требуемом уровне, даже стандартные версии LVDT датчиков обычно имеют гораздо лучший уровень защиты от внешний воздействий, чем POTS.
- Вибрация не вызывает влияния на пропадание сигнала, в отличие от POTS, где скользящий бегунок может прервать контакт с проводником при вибрации.
2. Преимущества над магнитострикционными датчиками.
3. Преимущества над кодерами (датчиками положения).
- Имеют лучший аналоговый частотный отклик.
- Имеют более прочный корпус.
- Сразу после включения «знают» положение штока, в отличии от кодеров, которым надо указывать постоянную ссылку на известное положение.
4. Преимущества над переменными векторными резистивными преобразователями (VRVT)
- Имеют меньший диаметр корпуса.
- Более прочные и не изнашиваются.
- Могут использоваться значительно дольше.
5. Преимущества над линейными емкостными датчиками
- LVDT датчики как правило более дешевы.
- Менее восприимчивы к внешним условиям эксплуатации.
- Значительно более прочные.
Особенности индуктивных датчиков перемещения LVDT
- Максимальная рабочая температура 600°C.
- Минимальная рабочая температура –220°C (для справки, температура жидкого азота -196°C, температура жидкого гелия -269°С).
- Могут работать при уровне радиации 100,000 рад.
- Могут работать при давлении 200Бар.
- Могут работать под водой, при этом вода может попадать внутрь датчика не причиняя ему вреда. Существует специальная серия подводных датчиков, которые могут без тех. осмотра работать под водов в течении 10-ти лет, работать под водой на глубине до 2,2км. Кабельные разъемы могут подсоединяться так же под водой.
Основные сферы применения LVDT датчиков
Промышленные измерительные системы
- Регулирующие вентили - везде, где существуют регулирующие вентили индуктивные датчики перемещения могут быть использованы для контроля положения штока вентиля. Особенно, где есть ответственные участки работы, например, в клапанах пара для турбин на электростанциях.
- Контроль положения шлюзов - погружные датчики перемещения подходят для измерения положения шлюзов в водохозяйственных и канализационных системах.
- Измерение зазора между валками.
Для поддержания равномерной толщины проката зазор между валками часто измеряется на обоих концах. - Контроль перемещения штоков вентилей на подводных нефте/газо проводах.
- Контроль работы гидравлических активаторов - измерение перемещения объекта, который передвигает активатор. Благодаря очен высокой износостойкости, данные LVDT датчики перемещения могут выдерживать миллионы циклов перемещения.
- Контроль положения/перемещения режущих инструментов, отрезающих рулонные материалы.
- Измеряет положение/смещение роликов, которые используется для выпрямления полосового проката перед штамповкой.
- Могут быть использованы для динамического измерения размеров (диаметров) рулонов продукта, например, инициировать сигнал к системе управления, когда рулон достигает максимального/минимального размера при наматывании/сматывании материала.
Станки
- Могут быть использованы в испытательных приспособлениях для измерения круглости, плоскостности и т.д. частей машин для анализа качества их изготовления.
- Могут быть использованы для оценки и контроля взаимного расположения компонентов деталей в сборке, когда требуется юстировка/подгонка размеров взаимного расположения деталей.
Авиация/космонавтика
- Могут быть использованы для оценки реакции привода на действие активатора. Например, преобразователь измеряет положение отклонения закрылков крыла самолета при техническом обслуживании. Тут очень важно измерить скорость срабатывания активатора после подачи на него управляющего сигнала, а так же скорость изменения положения закрылков.
- Анализ Ротора вертолета
Датчики LVDT используются на вертолетах, чтобы измерить угол наклона лопастей ротора. - Могут быть использованы для оценки смещения корпуса двигателя при нагревании.
- Могут быть использованы для измерения смещения (деформации) лопасти турбины при внешнем воздействии.
- Могут быть использованы для измерения отклонения диафрагмы сопла реактивного двигателя.
- Могут быть использованы для
Строительство / Проектирование зданий и сооружений
- Могут быть использованы для измерения вибрации или деформации мостов при изменении трафика движения или порывов ветра.
- Могут быть использованы для измерения смещения грунта при строительстве, контроля оползней и насыпных дамб.
- Могут быть использованы при испытании крупногабаритных строительных конструкций, балок, пролетов моста и т. д. на силовую деформацию.
Автомобилестроение
- Могут быть использованы для контроля смещения корпуса двигателя при его испытаниях.
- Идеальным применением LVDT датчиков может быть тестирование компонентов подвески автотранспорта.
- Могут быть использованы для контроля изготовления прецизионных компонентов.
- Могут быть использованы для настройки компонентов двигателя, таких как дизельные форсунки.
- Могут быть использованы для тестирования , дверей, педалей и ручек транспортных средств для моделирования продления их срока службы.
- Могут быть использованы для измерения профиля поверхности заготовки, например стекла или других площадных объектов.
Выработка энергии
- Могут быть использованы для измерения биения вала турбины.
- Могут быть использованы для контроля положения главного парового клапана, который регулирует поток пара в турбину. Клапан постоянно корректирует свое положения для поддержания постоянной скорости вращения турбины. LVDT датчики идеально подходят для работы в зоне высоких температур, грязи и постоянной вибрации.
- Могут быть использованы для контроля положения перепускного клапана. Когда откроется перепускной клапан, датчик может испытать температуру 200°C.
Индуктивный датчик (inductive sensor) – это датчик бесконтактного типа, предназначенный для контроля положения объектов из металла.
Принцип работы
Работа индуктивного датчика основана на взаимодействии магнитного поля катушки, расположенной внутри датчика, и металла, из которого состоит объект.
При приближении металлического объекта (5) к катушке (3), магнитное поле (4) изменяется, что в свою очередь заставляет компаратор (2) сформировать сигнал, который впоследствии поступит на усилитель (1) и далее в цепь управления.
Параметры
Напряжение питания – диапазон напряжения, при котором датчик работает корректно.
Максимальный ток переключения - количество непрерывного тока, которое пропускаясь через датчик, не вызывает повреждение датчика.
Минимальный ток переключения - минимальное значение тока, которое должно протекать через датчик, чтобы гарантировать работу.
Рабочее расстояние (Sn) – максимальное расстояние от поверхности датчика, до квадратного куска железа толщиной 1 мм в осевом направлении. Расстояние будет уменьшаться для других материалов, зависимость Sn от материала представлена в таблице.
Частота переключения - максимальное количество переключений датчика в секунду.
Способ подключения
Способ подключения зависит от типа индуктивного датчика.
Трехпроводные – два вывода отвечают за питание датчика, а третий подключается к нагрузке. В зависимости от структуры (NPN или PNP) нагрузка подключается к положительному (NPN) или отрицательному (PNP) полюсу источника постоянного напряжения.
Четырехпроводные – два вывода питания, два вывода подключаются к нагрузке.

Существуют также двух и пятипроводные датчики, но используются они реже из-за особенностей подключения.
Рассмотрим стандартный датчик, который наиболее часто используется в ЧПУ-станках или 3d-принтерах в качестве концевого выключателя. Датчик имеет 3 вывода и NPN структуру. Размеры датчика 12x50мм, расстояние обнаружения 4мм. Напряжение питания 6-36 В.

На реальном примере продемонстрируем работу датчика. В качестве нагрузки подключаем светодиод с токоограничивающим резистором , а затем подносим металлическую пластину к датчику.

Индуктивные датчики – преобразователи параметров. Их работа заключается в изменении индуктивности путем изменения магнитного сопротивления датчика.
Большую популярность индуктивные датчики получили на производстве для измерения перемещений в интервале от 1 микрометра до 20 мм. Индуктивный датчик можно применять для замера уровней жидкости, газообразных веществ, давлений, различных сил. В этих случаях диагностируемый параметр преобразуется чувствительными компонентами в перемещение, далее эта величина поступает на индуктивный преобразователь.
Для замера давления применяются чувствительные элементы. Они играют роль датчиков приближения, предназначенные для выявления разных объектов бесконтактным методом.
Виды и устройство
Индуктивные датчики разделяются по схеме построения на 2 вида:
- Одинарные датчики.
- Дифференциальные датчики.
Первый вид модели имеет одну ветвь измерения, в отличие от дифференциального датчика, у которого две измерительные ветви.
В дифференциальной модели при изменении диагностируемого параметра изменяются индуктивности 2-х катушек. При этом изменение осуществляется на одинаковое значение с противоположным знаком.
Индуктивность катушки вычисляется по формуле: L = WΦ/I
Где W – количество витков; Ф – магнитный поток; I – сила тока, протекающего по катушке. Сила тока взаимосвязана с магнитодвижущей силой следующим отношением: I = Hl/W
Из этой формулы получаем: L = W²/Rm
Где R m = H*L/Ф – магнитное сопротивление.
Работа одинарного датчика заключается в свойстве дросселя, изменять индуктивность при увеличении или уменьшении воздушного промежутка.

Конструкция датчика включает в себя ярмо (1), витки обмотки (2), якорь (3), который фиксируется пружинами. По сопротивлению поступает переменный ток на обмотку. Сила тока в нагрузочной цепи вычисляется:

L – индуктивность датчика, r d – активное дроссельное сопротивление. Оно является постоянной величиной, поэтому изменение силы тока I может осуществляться только путем изменения составляющей индуктивности XL=I R н , зависящей от размера воздушного промежутка δ .
Каждой величине зазора соответствует некоторое значение тока, определяющего падение напряжения на резисторе R н: U вых =I*R н – является сигналом выхода датчика. Можно определить следующую зависимость U вых = f (δ) , при одном условии, что зазор очень незначительный и потоки рассеивания можно не учитывать, как и магнитное сопротивление металла R мж в сравнении с магнитным сопротивлением зазора воздуха R мв.
Окончательно получается выражение:

На практике активное сопротивление цепи несравнимо ниже индуктивного. Поэтому формула принимает вид:

Из недостатков одинарных можно отметить:
- При эксплуатации датчика на якорь воздействует сила притяжения к сердечнику. Эта сила не уравновешена никакими методами, поэтому она снижает точность функционирования датчика, и вносит некоторый процент погрешности.
- Сила нагрузочного тока зависит от амплитуды напряжения и ее частоты.
- Чтобы измерить перемещение в двух направлениях, нужно установить первоначальное значение зазора, что доставляет определенные неудобства.
Дифференциальные индуктивные датчики объединяют в себе два нереверсивных датчика и изготавливаются в виде некоторой системы, которая состоит из 2-х магнитопроводов, имеющих два отдельных источника напряжения. Для этого чаще всего применяется разделительный трансформатор (5).

Дифференциальные датчики классифицируются по форме сердечника:
- Индуктивные датчики с Ш-образной формой магнитопровода, выполненного в виде листов электротехнической стали. При частоте более 1 килогерца для сердечника используют пермаллой.
- Цилиндрические индуктивные датчики с круглым магнитопроводом.
Форму датчика выбирают в зависимости от конструкции и ее сочетания с механизмом. Использование магнитопровода Ш-образной формы является удобным для сборки катушки и снижения габаритных размеров индуктивного датчика.
Для функционирования дифференциального датчика применяют питание от трансформатора (5), который имеет вывод от средней точки. Между этим выводом и общим проводом катушек подключают прибор (4). При этом воздушный промежуток находится в пределах от 0,2 до 0,5 мм.
При расположении якоря в средней позиции при равных промежутках индуктивные сопротивления обмоток (3 и 3′) равны. Значит, значения токов катушек также одинаковы, и общий полученный ток в устройстве равен нулю.
При малом отклонении якоря в любую сторону изменяется значение воздушных промежутков и индуктивностей. Поэтому прибор определяет ток разности I 1 -I 2 , который определен функцией перемещения якоря от средней позиции. Разность токов чаще всего определяется магнитоэлектрическим устройством (4), выполненным по типу микроамперметра со (В) на входе.
Полярность тока не зависит от изменения общего сопротивления катушек. При применении фазочувствительных схем выпрямления можно определить направление перемещения якоря от средней позиции.
Параметры
- Одним из параметров индуктивных датчиков является диапазон срабатывания . По этому параметру выбирают датчики, однако он не настолько важен. В инструкции по датчику даны номинальные параметры питания при эксплуатации устройства при температуре +20 градусов. Постоянное напряжение для датчика – 24 В, а переменное 230 В. Обычно датчик работает в совершенно других условиях.
На практике при подборе датчика важны два показателя интервала срабатывания:
— Полезный.
— Эффективный.
Показания первого вычисляются как + 10% от 2-го при температуре 25-70 градусов. Показания 2-го отличаются от номинала на 10%. Интервал температуры при этом увеличивается с 18 до 28 градусов. Если при втором параметре применяется номинальное напряжение, то при первом есть разброс 85-110%.
- Другим параметром является гарантированный предел срабатывания . Он колеблется от нуля до 81% от номинала.
- Также следует учитывать параметры: повторяемость и гистерезис , который равен расстоянию между конечными позициями работы датчика. Его оптимальная величина равна 20% от эффективного интервала срабатывания.
- Нагрузочный ток . Изготовители иногда производят датчики специального исполнения на 500 миллиампер.
- Частота отклика . Этот параметр определяет наибольшую величину возможности переключения в герцах. Основные промышленные датчики имеют частоту отклика 1000 герц.
Методы подключения на схемах
Имеется несколько видов индуктивных датчиков с различным числом проводов для подключения. Рассмотрим основные виды подключений разных индуктивных датчиков.

- Двухпроводные индуктивные датчики подключаются непосредственно в нагрузочную цепь. Это наиболее простой способ, однако в нем есть особенности. Для такого способа для нагрузки требуется номинальное сопротивление. Если это сопротивление будет больше или меньше, то устройство функционирует некорректно. При включении датчика на постоянный ток нельзя забывать о полярности выводов.
- Трехпроводные индуктивные датчики наиболее популярны. В них имеется два проводника для подключения питания, а один для нагрузки.
- Четырехпроводные и пятипроводные индуктивные датчики. У них два провода на питание, другие два на нагрузку, пятый проводник для выбора режима эксплуатации.
Цветовая маркировка
Маркировка проводников цветом является очень удобной для осуществления обслуживания и монтажа датчиков. Их выходные проводники промаркированы определенным цветом:
- Минус – синий.
- Плюс – красный.
- Выход – черный цвет.
- Второй проводник выхода – белый цвет.
Погрешности
Погрешность преобразования диагностируемого параметра влияет на способность выдачи информации индуктивным датчиком. Суммарная погрешность состоит из множества различных погрешностей.
- Электромагнитная погрешность является случайной величиной. Она появляется вследствие индуцирования ЭДС в катушке датчика наружными магнитными полями. На производстве возле силовых электрических устройств существуют магнитные поля чаще всего частотой 50 герц.
- Погрешность от температуры также является случайным значением, так как работа большого количества элементов датчика зависит от температуры и является значительной величиной, учитываемой при проектировании датчиков.
- Погрешность магнитной упругости . Она появляется от нестабильности деформаций сердечника при сборке прибора, а также из-за изменения деформаций при работе. Влияние нестабильности напряжений в магнитопроводе образует нестабильность сигнала на выходе.
- Погрешности устройства появляются по причине влияния измеряющей силы на деформации элементов датчика, а также влияния скачка усилия измерения на нестабильность деформации. Также на погрешность влияют люфты и зазоры в подвижных частях конструкции датчика.
Погрешность кабеля образуется от непостоянной величины сопротивления, деформации кабеля и его температуры, наводок электродвижущей силы в кабеле от внешних полей.
- Тензометрическая погрешность случайная величина и зависит от качества намотки витков провода. При намотке возникают механические напряжения, изменение которых при функционировании датчика приводит к изменению сопротивления обмотки постоянному току, а значит, изменению сигнала на выходе. Чаще всего в качественных датчиках эту погрешность не учитывают.
- Погрешность старения датчика появляется от износа движущихся частей устройства датчика, а также постоянного изменения электромагнитных свойств магнитопровода. Такую погрешность считают также случайным значением. При определении погрешности износа учитывается кинематика устройства датчика. При проектировании датчика рекомендуется определять его срок эксплуатации в нормальном режиме, за период которого погрешность от износа не превзойдет заданного значения.
- Погрешность технологии появляется при отклонениях от техпроцесса изготовления датчика, разброса параметров катушек и элементов при сборке, от влияния натягов и зазоров при сопряжении деталей. Оценка погрешности технологии производится простыми механическими измерителями.
Электромагнитные параметры материалов и их свойства со временем меняются. Чаще всего процессы изменения свойств материалов происходят в первые 200 часов после термообработки сердечника магнитопровода. Далее эти свойства остаются теми же, и не влияют на полную погрешность датчика.
Достоинства
- Большая чувствительность.
- Повышенная мощность выхода, до нескольких десятков Вт.
- Возможность подключения к промышленным источникам частоты.
- Прочное и простое устройство.
- Нет трущихся контактов.
Недостатки
- Способны функционировать только на переменном напряжении.
- Стабильность питания и частота влияют на точность работы датчика.
Сфера использования
- Медицинские аппараты.
- Бытовая техника.
- Автомобильная промышленность.
- Робототехническое оборудование.
- Промышленная техника регулирования и измерения.
Индуктивный датчик - это преобразователь параметрического типа, принцип действия которого основан на изменении индуктивности L или взаимоиндуктивности обмотки с сердечником, вследствие изменения магнитного сопротивления R М магнитной цепи датчика, в которую входит сердечник.
Широкое применение индуктивные датчики находят в промышленности для измерения перемещений и покрывают диапазон от 1мкм до 20мм. Также можно использовать индуктивный датчик для измерения давлений, сил, уровней расхода газа и жидкости и т. д. В этом случае измеряемый параметр с помощью различных чувствительных элементов преобразуется в изменение перемещения и затем эта величина подводится к индуктивному измерительному преобразователю. В случае измерения давлений, чувствительные элементы могут выполняться в виде упругих мембран, сильфонов, и т. д. Используются они и в качестве датчиков приближения, которые служат для обнаружения различных металлических и неметаллических объектов бесконтактным способом по принципу “да” или “нет”.
Возможные области применения датчиков чрезвычайно разнообразны, можно выделить лишь отдельные сферы:
промышленная техника измерения и регулирования,
робототехника,
автомобилестроение,
бытовая техника,
медицинская техника.
Достоинства :
Простота и прочность конструкции, отсутствие скользящих контактов;
Возможность подключения к источникам промышленной частоты;
Относительно большая выходная мощность (до десятков Ватт);
Значительная чувствительность.
Недостатки :
- точность работы зависит от стабильности питающего напряжения по частоте;
Возможна работа только на переменном токе.
Типы преобразователей и их конструктивные особенности
По схеме построения датчики можно разделить на одинарные и дифференциальные. Одинарный датчик содержит одну измерительную ветвь, дифференциальный – две.
|
Тип датчика |
Переменный зазор |
Переменная площадь зазора |
Соленоидные |
|
|
Индуктивные |
Одинарные | |||
|
Дифференциальные |
|
|
|
|
|
Взаимоиндуктивные |
Одинарные |
|
|
|
|
Дифференциальные |
|
|
|
|









В дифференциальном датчике при изменении измеряемого параметра одновременно изменяются индуктивности двух одинаковых катушек, причем изменение происходит на одну и ту же величину, но с обратным знаком.
Как известно, индуктивность катушки:
 ,
,
где W
–
число витков; Ф
– пронизывающий ее магнитный поток;
 –
проходящий по катушке ток. Ток связан
с МДС
–
проходящий по катушке ток. Ток связан
с МДС соотношением:
соотношением:
 .
.
Откуда получаем:
 ,
,
где
 –
магнитное сопротивление преобразователя.
–
магнитное сопротивление преобразователя.
Рассмотрим, например, одинарный индуктивный датчик. В основу его работы положено свойство дросселя с воздушным зазором изменять свою индуктивность при изменении величены воздушного зазора.

Состоит из ярма 1, обмотки 2, якоря 3- удерживается пружинами.
На обмотку 2 через сопротивление нагрузки R н подается напряжение питания переменного тока.
Ток в цепи нагрузки определяется как:

где r д - активное сопротивление дросселя;
L - индуктивность датчика.
Т.к. активное сопротивление цепи величина постоянная, то изменение тока I может происходить только за счет изменения индуктивной составляющей
которая зависит от величены воздушного зазора .
Т.о. , каждому значению соответствует определенное значение I , создающего падение напряжения на сопротивлении R н:
U вых =IR н -
представляет собой выходной сигнал датчика.
Можно вывести аналитическую зависимость U вых =f(, при условии что зазор достаточно мал и потоками рассеяния можно пренебречь, и пренебречь магнитным сопротивлением железа R мж по сравнению с магнитным сопротвлением воздушного зазора R мв .
Приведем конечное выражение:

В реальных устройствах активное сопротивление цепи намного меньше индуктивного, тогда выражение сводится к виду:

Т.о. зависимость U вых =f( имеет линейный характер (в первом приближении).
Реальная характеристика имеет вид :

Отклонение от линейности в начале объясняется принятым допущением R мж R мв .
При малых магнитное сопротивление железа соизмеримо с магнитным сопротивлением воздуха.
Отклонение при больших объясняются тем, что при больших R L становится соизмеримой с величиной активного сопротивления - R н +r д .
В целом рассмотренный датчик имеет ряд существенных недостатков:
Не меняется фаза тока при изменении направления перемещения;
При необходимости измерять в обоих направлениях перемещение нужно устанавливать начальный воздушный зазор и, следовательно, ток I 0 ,что неудобно;
Ток в нагрузке зависит от амплитуды и частоты питающего напряжения;
В процессе работы датчика на якорь действует сила притяжения к магнитопроводу, которая ничем не уравновешивается, и значит вносит погрешность в работу датчика.
Дифференциальные (реверсивные) индуктивные датчики (ДИД)
ДИД представляет собой совокупность двух нереверсивных датчиков и выполняются в виде системы, состоящей из двух магнитопроводов с общим якорем и двумя катушками. Для ДИД необходимы два раздельных источника питания, для чего обычно используется разделительный трансформатор 5.
По форме магнитопровода могут быть ДИД с магнитопроводом Ш- образной формы, набранные из мостов электротехнической стали (при частотах выше 1000Гц применяются железо- никелевые сплавы- пермолой), и цилиндрические- со сплошным магнитопроводом круглого сечения. Выбор формы датчика зависит от конструктивного сочетания его с контролируемым устройством. Применение Ш- образного магнитопровода обусловлено удобством сборки катушки и уменьшением габаритов датчика.
Для питания ДИД используют трансформатор 5 с выводом средней точки на вторичной обмотке. Между ним и общим концом обеих катушек включается прибор 4. Воздушный зазор 0,2-0,5 мм.
При среднем положении якоря, когда воздушные зазоры с обеих? одинаковы, индуктивные сопротивления катушек 3 и 3 одинаковы следовательно величины токов в катушках равныI 1 =I 2 и результирующий ток в приборе равен 0.

При небольшом отклонении якоря в ту или иную сторону под действием контролируемой величены Х меняются величины зазоров и индуктивностей, прибор регистрирует разностный токI 1 -I 2 ,он является функцией смещения якоря от среднего положения. Разность токов обычно регистрируется с помощью магнитоэлектрического прибора 4 (микроамперметра) с выпрямительной схемой В на входе.
Характеристика датчика имеет вид:

Полярность выходного тока остается неизменной независимо от знака изменения полного сопротивления катушек(для схемы Рис.1). При изменении направления отклонения якоря от среднего положения меняется на противоположную (на 180°) фаза тока на выходе датчика. При использовании фазочувствительных выпрямительных схем можно получить индикацию направления перемещения якоря от среднего положения.
Характеристика ДИД с ФЧВ имеет вид:

Погрешность преобразования индуктивного датчика
Информативная способность индуктивного датчика в значительной мере определяется его погрешностью преобразования измеряемого параметра. Суммарная погрешность индуктивного датчика складывается из большого числа составляющих погрешностей. Можно выделить следующие погрешности индуктивного датчика:
1) Погрешность от нелинейности характеристики. Мультипликативная составляющая общей погрешности. Из-за принципа индуктивного преобразования измеряемой величины, лежащего в основе работы индуктивных датчиков, является существенной и в большинстве случаев определяет диапазон измерения датчика. Обязательно подлежит оценке при разработке датчика.
2) Температурная погрешность. Случайная составляющая. Ввиду большого числа зависимых от температуры параметров составных частей датчика составляющая погрешность может достичь больших величин и является существенной. Подлежит оценке при разработке датчика.
3) Погрешность от
влияния внешних электромагнитных полей.
Случайная составляющая общей погрешности.
Возникает из-за индуцирования ЭДС в
обмотке датчика внешними полями и из-за
изменения магнитных характеристик
магнитопровода под действием внешних
полей. В производственных помещениях
с силовыми электроустановками
обнаруживаются магнитные поля с
индукцией
 Тл и частотой в основном 50 Гц. Поскольку
магнитопроводы индуктивных датчиков
работают при индукциях 0,1 – 1 Тл, то доля
от внешних полей составит 0,05–0,005% даже
в случае отсутствия экранирования.
Введение экрана и применение
дифференциального датчика снижают эту
долю примерно на два порядка. Таким
образом, погрешность от влияния внешних
полей должна приниматься в рассмотрение
только при проектировании датчиков
малой чувствительности и с невозможностью
достаточной экранировки. В большинстве
случаев эта составляющая погрешности
не является существенной.
Тл и частотой в основном 50 Гц. Поскольку
магнитопроводы индуктивных датчиков
работают при индукциях 0,1 – 1 Тл, то доля
от внешних полей составит 0,05–0,005% даже
в случае отсутствия экранирования.
Введение экрана и применение
дифференциального датчика снижают эту
долю примерно на два порядка. Таким
образом, погрешность от влияния внешних
полей должна приниматься в рассмотрение
только при проектировании датчиков
малой чувствительности и с невозможностью
достаточной экранировки. В большинстве
случаев эта составляющая погрешности
не является существенной.
4) Погрешность от
магнитоупругого эффекта. Возникает
из-за нестабильности деформаций
магнитопровода при сборке датчика
(аддитивная составляющая) и из-за
изменения деформаций в процессе
эксплуатации датчика (случайная
составляющая). Расчеты с учетом наличия
зазоров в магнитопроводе показывают,
что влияние нестабильности механических
напряжений в магнитопроводе вызывает
нестабильность выходного сигнала
датчика порядка
 ,
и в большинстве случаев эта составляющая
может специально не учитываться.
,
и в большинстве случаев эта составляющая
может специально не учитываться.
5) Погрешность от тензометрического эффекта обмотки. Случайная составляющая. При намотке катушки датчика в проводе создаются механические напряжения. Изменение этих механических напряжений в процессе эксплуатации датчика ведет к изменению сопротивления катушки постоянному току и, следовательно, к изменению выходного сигнала датчика. Обычно для правильно спроектированных датчиков , т. е. эту составляющую не следует специально учитывать.
6) Погрешность от
соединительного кабеля. Возникает из-за
нестабильности электрического
сопротивления кабеля под действием
температуры или деформаций и из-за
наводок ЭДС в кабеле под действием
внешних полей. Является случайной
составляющей погрешности. При
нестабильности собственного сопротивления
кабеля погрешность выходного сигнала
датчика
 .
Длина соединительных кабелей составляет
1–3 м и редко больше. При выполнении
кабеля из медного провода сечением
.
Длина соединительных кабелей составляет
1–3 м и редко больше. При выполнении
кабеля из медного провода сечением сопротивление кабеля менее 0,9 Ом,
нестабильность сопротивления
сопротивление кабеля менее 0,9 Ом,
нестабильность сопротивления .
Поскольку полное сопротивление датчика
обычно больше 100 Ом, погрешность выходного
сигнала датчика может составить величину
.
Поскольку полное сопротивление датчика
обычно больше 100 Ом, погрешность выходного
сигнала датчика может составить величину .
Следовательно, для датчиков, имеющих
малое сопротивление в рабочем режиме,
погрешность следует оценивать. В
остальных случаях она не является
существенной.
.
Следовательно, для датчиков, имеющих
малое сопротивление в рабочем режиме,
погрешность следует оценивать. В
остальных случаях она не является
существенной.
7) Конструктивные погрешности. Возникают под действием следующих причин: влияние измерительного усилия на деформации деталей датчика (аддитивная), влияние перепада измерительного усилия на нестабильность деформаций (мультипликативная), влияние направляющих измерительного стержня на передачу измерительного импульса (мультипликативная), нестабильность передачи измерительного импульса вследствие зазоров и люфтов подвижных частей (случайная). Конструктивные погрешности в первую очередь определяются недостатками в конструкции механических элементов датчика и не являются специфическими для индуктивных датчиков. Оценка этих погрешностей производится по известным способам оценки погрешностей кинематических передач измерительных устройств.
8) Технологические погрешности. Возникают вследствие технологических отклонений взаимного положения деталей датчика (аддитивная), разброса параметров деталей и обмоток при изготовлении (аддитивная), влияния технологических зазоров и натягов в соединении деталей и в направляющих (случайная).
Технологические погрешности изготовления механических элементов конструкции датчика также не являются специфическими для индуктивного датчика, их оценка производится обычными для механических измерительных устройств способами. Погрешности изготовления магнитопровода и катушек датчика ведут к разбросу параметров датчиков и к затруднениям, возникающим при обеспечении взаимозаменяемости последних.
9) Погрешность от старения датчика. Эта составляющая погрешности вызывается, во-первых, износом подвижных элементов конструкции датчика и, во-вторых, изменением во времени электромагнитных характеристик магнитопровода датчика. Погрешность следует рассматривать как случайную. При оценке погрешности от износа во внимание принимается кинематический расчет механизма датчика в каждом конкретном случае. На стадии конструирования датчика в этом случае целесообразно задавать срок службы датчика в нормальных для него условиях эксплуатации, за время которого дополнительная погрешность от износа не превысит заданной величины.
Электромагнитные свойства материалов изменяются во времени.
В большинстве случаев выраженные процессы изменения электромагнитных характеристик заканчиваются в течение первых 200 часов после термообработки и размагничивания магнитопровода. В дальнейшем они остаются практически постоянными и не играют существенной роли в общей погрешности датчика.
Проведенное выше рассмотрение составляющих погрешности индуктивного датчика дает возможность оценить их роль в формировании общей погрешности датчика. В большинстве случаев определяющими являются погрешность от нелинейности характеристики и температурная погрешность преобразователя.
Расчет индуктивных датчиков перемещений
Целью расчета индуктивного измерительного преобразователя является определение его конструктивных параметров по заданным метрологическим характеристикам или расчет метрологических характеристик данной конструкции индуктивного измерительного преобразователя.
Эти расчеты связаны с теорией электромагнитных цепей. Основными метрологическими характеристиками индуктивного измерительного преобразователя являются:
1) диапазон измерения
с допустимой погрешностью
 ;
;
2) чувствительность
преобразования (относительная)
 ;
;
3) погрешность
преобразования (относительная)
 .
.
В качестве конструктивных параметров индуктивного преобразователя, определяющих его метрологические характеристики, необходимо учитывать геометрические размеры магнитопровода и его материал, геометрические размеры и число витков катушки преобразователя.
С точки зрения расчета индуктивные измерительные преобразователи можно разделить на три вида: преобразователи с переменной длиной немагнитных зазоров в магнитопроводе, преобразователи с переменной площадью немагнитных зазоров в магнитопроводе и соленоидные преобразователи.
Выходной величиной
индуктивного измерительного преобразователя
является его полное сопротивление,
модуль которого определяется зависимостью
 ,
где
,
где – добротность преобразователя.
– добротность преобразователя.
Индуктивность
преобразователя
 в первую очередь зависит от конструктивных
параметров преобразователя и
электромагнитных характеристик его
элементов (в рабочем диапазоне частот).
Величины
в первую очередь зависит от конструктивных
параметров преобразователя и
электромагнитных характеристик его
элементов (в рабочем диапазоне частот).
Величины и
и существенно зависят ещё и от режима
работы преобразователя и, в частности,
от частоты
существенно зависят ещё и от режима
работы преобразователя и, в частности,
от частоты .
В связи с этим модуль полного сопротивления
преобразователя
.
В связи с этим модуль полного сопротивления
преобразователя будет определенной величиной только
для фиксированного режима работы
преобразователя.
будет определенной величиной только
для фиксированного режима работы
преобразователя.
С другой стороны,
характерной особенностью добротности
 является слабая зависимость этой
величины (в рабочем диапазоне режимов
преобразователя) от режима работы
преобразователя и входной величины.
является слабая зависимость этой
величины (в рабочем диапазоне режимов
преобразователя) от режима работы
преобразователя и входной величины.
Приведенные
рассуждения показывают целесообразность
применения для характеристики индуктивного
измерительного преобразователя двух
достаточно стабильных величин
 и
и .
.
При этом с небольшой
погрешностью результата в практических
случаях можно принять
 и вместо зависимости
и вместо зависимости рассматривать зависимость
рассматривать зависимость ,
приняв последнюю в качестве функции
преобразования индуктивного измерительного
преобразователя.
,
приняв последнюю в качестве функции
преобразования индуктивного измерительного
преобразователя.
Применяемые методы
расчета индуктивных преобразователей
базируются на теории магнитных цепей
с зазорами. Исходными являются следующие
расчетные соотношения: магнитный поток
в магнитопроводе
 ,
где
,
где –
намагничивающая сила обмотки
преобразователя,
–
намагничивающая сила обмотки
преобразователя, –
магнитное комплексное сопротивление
магнитопроводов и зазоров;
–
магнитное комплексное сопротивление
магнитопроводов и зазоров;
индуктивность
преобразователя
 ,
где
,
где –
число витков обмотки преобразователя.
–
число витков обмотки преобразователя.
Решение задачи
сводится к определению магнитного
сопротивления магнитной цепи. Последнее
складывается из магнитного сопротивления
ферромагнитных и немагнитных участков
цепи
 ,
где
,
где ,
, –
полное активное магнитное сопротивление
и полное реактивное магнитное
сопротивление.
–
полное активное магнитное сопротивление
и полное реактивное магнитное
сопротивление.
Для нахождения
 и
и предлагаются следующие соотношения:
предлагаются следующие соотношения:
 ;
;  ,
,
где
 ,
, – удельное активное и реактивное
магнитные сопротивления,
– удельное активное и реактивное
магнитные сопротивления, ,
, –
длина и площадь сечения однородных
участков магнитопровода.
–
длина и площадь сечения однородных
участков магнитопровода.
Удельное активное
сопротивление
 учитывает магнитные свойства вещества
магнитопровода и определяется из
соотношения
учитывает магнитные свойства вещества
магнитопровода и определяется из
соотношения
 .
.
Удельное реактивное
магнитное сопротивление
 учитывает потери в магнитопроводе, в
первую очередь от вихревых токов, в
значительной мере определяется не
только материалом магнитопровода, но
и его конструкцией. При слабо выраженном
поверхностном эффекте в магнитопроводе
преобразователя допустимо при расчете
принимать
учитывает потери в магнитопроводе, в
первую очередь от вихревых токов, в
значительной мере определяется не
только материалом магнитопровода, но
и его конструкцией. При слабо выраженном
поверхностном эффекте в магнитопроводе
преобразователя допустимо при расчете
принимать .
С учетом сказанного при практических
расчетах часто принимают
.
С учетом сказанного при практических
расчетах часто принимают
 ,
где
,
где ,
, –
длина и площадь сечения немагнитных
зазоров.
–
длина и площадь сечения немагнитных
зазоров.
Схемы включения индуктивных датчиков
Схема включения индуктивного датчика перемещений осуществляет его согласование с электрическим вторичным измерительным преобразователем и преобразует изменение полного сопротивления датчика в изменение электрического тока или напряжения. Электрические вторичные измерительные преобразователи индуктивных измерительных устройств являются общими для самых разнообразных электрических устройств, предназначенных для измерения различных неэлектрических величин.
В любую схему включения индуктивный датчик размера может входить либо непосредственно, либо в составе резонансного контура параллельного или последовательного. Применение включения датчика в резонансный контур позволяет в ряде случаев повысить чувствительность измерения и улучшить линейность характеристики датчика. С этой точки зрения все схемы включения - индуктивных датчиков можно разделить на безрезонансные, в которых индуктивный датчик включен в схему непосредственно, и резонансные, в которых индуктивный датчик входит в схему в составе колебательного контура.
Независимо от предыдущего деления применяют следующие типы схем включения индуктивных датчиков:
последовательную (схема генератора тока);
схему делителя напряжения;
мостовую;
частотную;
трансформаторную.
Применяемый тип схемы зависит от того, какой датчик применяется - индуктивный или взаимоиндуктивный. Кроме того, вид схемы одного и того же типа изменяется при включении простого и дифференциального датчика.
Последовательные схемы включения
В
Рисунок
4.8.1.1 арианты
последовательных схем показаны на
рисунке 4.8.1.1. Индуктивный датчик
арианты
последовательных схем показаны на
рисунке 4.8.1.1. Индуктивный датчик питается переменным напряжением
питается переменным напряжением .
Величина тока
в датчике при постоянной величине
питающего напряжения будет зависеть
от его сопротивления:
.
Величина тока
в датчике при постоянной величине
питающего напряжения будет зависеть
от его сопротивления:
 ,
где
,
где – круговая частота питания схемы,
– круговая частота питания схемы, – добротность датчика,
– добротность датчика, – сопротивление потерь датчика,
– сопротивление потерь датчика, – частота питающего датчик тока.
– частота питающего датчик тока.
Чувствительность преобразования последовательной схемы
 .
.
Изменение тока (выходной сигнал) при изменении полного сопротивления датчика
 ,
,
где
 – коэффициент преобразования схемы
включения.
– коэффициент преобразования схемы
включения.
Схема чувствительна
к изменению напряжения питания
 и частоты питающего тока Используя
простую последовательную схему включения
индуктивного датчика, нельзя получить
высокую чувствительность и точность
измерений.
и частоты питающего тока Используя
простую последовательную схему включения
индуктивного датчика, нельзя получить
высокую чувствительность и точность
измерений.
Последовательная
схема может быть безрезонансной
и резонансной
(см. 4.8.1.1 в). В
резонансной
схеме ток в цепи будет определяться
сопротивлением резонансного контура,
состоящего из индуктивности датчика
 и конденсатора
и конденсатора .
При изменении
.
При изменении это сопротивление меняется, вызывая
изменение тока.
это сопротивление меняется, вызывая
изменение тока.
Если частота питающего
напряжения
 совпадает с
собственной частотой колебательного
контура
совпадает с
собственной частотой колебательного
контура
 ,
то сопротивление последовательного
колебательного контура
минимально,
а параллельного – максимально. При
изменении индуктивности датчика
,
то сопротивление последовательного
колебательного контура
минимально,
а параллельного – максимально. При
изменении индуктивности датчика
 равенство частот
будет нарушено, и сопротивление
равенство частот
будет нарушено, и сопротивление
последовательного контура будет увеличиваться, а параллельного – уменьшаться. Соответствующим образом будет изменяться и ток в цепи. Чувствительность резонансной последовательной схемы в несколько раз выше чувствительности безрезонансной последовательной схемы.
В ариант
последовательной схемы для включения
дифференциального датчика показан
на рисунке 4.8.1.2. Каждая половина датчика
ариант
последовательной схемы для включения
дифференциального датчика показан
на рисунке 4.8.1.2. Каждая половина датчика и
и питается переменным током с напряжением
питается переменным током с напряжением .
При изменении
измеряемого размера одна индуктивность
уменьшается, а другая увеличивается на
одну и ту же величину. Соответствующим
образом изменяются токи в цепях обмоток
датчиков. Эти токи
.
При изменении
измеряемого размера одна индуктивность
уменьшается, а другая увеличивается на
одну и ту же величину. Соответствующим
образом изменяются токи в цепях обмоток
датчиков. Эти токи
 и
и выпрямляются диодами
выпрямляются диодами и
и и во встречной полярности протекают
через измеритель токаА.
Измеритель тока
будет показывать разницу токов в цепях
обмоток
и во встречной полярности протекают
через измеритель токаА.
Измеритель тока
будет показывать разницу токов в цепях
обмоток
 и
и

 .
При равенстве полных сопротивлений
.
При равенстве полных сопротивлений токи в их цепях будут равны, и амперметрА покажет
нуль. При изменении измеряемого
размера равенство сопротивлений
нарушится, и показания амперметра будут
отличаться от нуля.
токи в их цепях будут равны, и амперметрА покажет
нуль. При изменении измеряемого
размера равенство сопротивлений
нарушится, и показания амперметра будут
отличаться от нуля.
Направление тока
через амперметр будет зависеть от того,
в цепи какой катушки
 или
или ток в данный момент больше.
ток в данный момент больше.
Такие схемы включения дифференциальных индуктивных датчиков, которые реагируют не только на величину смещения измерительного стержня из нулевого положения, но и на направление смещения, называют фазочувствительными.
Схемы делителей напряжения
При включении по
схеме делителя напряжения датчик
включается в цепь последовательно
с некоторым постоянным сопротивлением
 ,
которое в общем виде может быть
комплексным. Добавочным сопротивлением
может служить, например, резистор,
индуктивность или емкость (см. рис.
4.8.2.1). При питании цепи переменным
напряжением, напряжение на датчике,
измеряемое вольтметромV
того или иного
типа, будет зависеть от полного
сопротивления датчика. Если соблюдается
условие
,
которое в общем виде может быть
комплексным. Добавочным сопротивлением
может служить, например, резистор,
индуктивность или емкость (см. рис.
4.8.2.1). При питании цепи переменным
напряжением, напряжение на датчике,
измеряемое вольтметромV
того или иного
типа, будет зависеть от полного
сопротивления датчика. Если соблюдается
условие
 ,
то
,
то
 ,
,
откуда следует, что напряжение на датчике прямо пропорционально величине его индуктивности.
Чувствительность по напряжению схемы
 .
.
Выходной сигнал схемы включения при изменении полного сопротивления датчика
С другой стороны,
выходное напряжение схемы делителя
напряжения зависит также от величины
напряжения питания
 и частоты питающего тока
и частоты питающего тока .
Нетрудно убедиться, что
.
Нетрудно убедиться, что и
и
 ;
следовательно, стабильность источника
питания по частоте и напряжению
определяет погрешность преобразования
измерительного сигнала схемой
делителя напряжения.
;
следовательно, стабильность источника
питания по частоте и напряжению
определяет погрешность преобразования
измерительного сигнала схемой
делителя напряжения.
Включение
дифференциального датчика в схему
делителя напряжения показано на
рисунке 4.8.2.2. Обмотки датчика
 и
и образуют делитель напряжения, питаемый
переменным током.
образуют делитель напряжения, питаемый
переменным током.
При изменении
индуктивностей обмоток будет изменяться
их полное сопротивление и падение
напряжения на обмотках. Это падение
напряжения выпрямляется диодами
 и
и .
Конденсаторы
.
Конденсаторы
 и
и служат для
сглаживания пульсаций выпрямленного
напряжения, а резисторы
служат для
сглаживания пульсаций выпрямленного
напряжения, а резисторы
 ,
, ,
, являются сопротивлениями нагрузки
для выпрямителей.
являются сопротивлениями нагрузки
для выпрямителей.
Показывающий
вольтметр V
подключен к
одноименным полюсам выпрямителей. В
этом случае он будет показывать
разницу напряжений на обмотках датчика
 и
и .
Когда индуктивности обмоток равны,
равны и их полные сопротивления и падения
напряжения на них. Вольтметр при этом
покажет нуль. Регулировка нулевых
показаний вольтметра при настройке
может осуществляться переменным
резистором
.
Когда индуктивности обмоток равны,
равны и их полные сопротивления и падения
напряжения на них. Вольтметр при этом
покажет нуль. Регулировка нулевых
показаний вольтметра при настройке
может осуществляться переменным
резистором .
.
Мостовые схемы
Весьма широкое распространение для включения индуктивных датчиков нашла мостовая схема включения в различных вариантах (см. рис. 4.8.3.1). Общий вид мостовых схем включения недифференциального индуктивного датчика показан на рисунке. Если соблюдается условие

г де
де – фазовый угол соответствующего
комплексного сопротивления, то
выходное напряжение
– фазовый угол соответствующего
комплексного сопротивления, то
выходное напряжение равно нулю, и мост в этом случае
сбалансирован или уравновешен. Условие
равновесия мостовой схемы формулируется
следующим образом: «для равновесия
мостовой схемы необходимо, чтобы
произведения модулей комплексных
сопротивлений накрест лежащих плеч
моста, а также суммы их углов фазовых
сдвигов были равны между собой». При
изменении индуктивности датчика условие
равновесия моста нарушается, и
выходное напряжение моста пропорционально
изменению индуктивности.
равно нулю, и мост в этом случае
сбалансирован или уравновешен. Условие
равновесия мостовой схемы формулируется
следующим образом: «для равновесия
мостовой схемы необходимо, чтобы
произведения модулей комплексных
сопротивлений накрест лежащих плеч
моста, а также суммы их углов фазовых
сдвигов были равны между собой». При
изменении индуктивности датчика условие
равновесия моста нарушается, и
выходное напряжение моста пропорционально
изменению индуктивности.
Плечи мостовой схемы
в общем случае являются комплексными
сопротивлениями и в конкретных схемах
включения могут быть реализованы
включением резисторов, индуктивностей
или емкостей. Пример реализации мостовой
схемы приведен на рисунке 4.8.3.1 б).
Одним плечом
моста является индуктивность датчика
 ,
второе плечо – компенсационная
индуктивность
,
второе плечо – компенсационная
индуктивность ,
третье и четвертое
– образованы резисторами
,
третье и четвертое
– образованы резисторами
 ,
, и
и .
Для резисторов
фазовый угол
.
Для резисторов
фазовый угол
 .
Для индуктивностей
.
Для индуктивностей .
В связи с этим удается обеспечить
условие равновесия мостовой схемы.
Балансировка мостовой схемы для
определенного значения
.
В связи с этим удается обеспечить
условие равновесия мостовой схемы.
Балансировка мостовой схемы для
определенного значения при настройке осуществляется резистором
при настройке осуществляется резистором или изменением
компенсационной индуктивности
или изменением
компенсационной индуктивности
 .
.
М остовые
схемы с компенсационной индуктивностью
не всегда удобны при практическом
исполнении. В этом отношении проще схемы
на резистивно-емкостных элементах (см.
рис. 4.8.3.1 в). Конденсатор
остовые
схемы с компенсационной индуктивностью
не всегда удобны при практическом
исполнении. В этом отношении проще схемы
на резистивно-емкостных элементах (см.
рис. 4.8.3.1 в). Конденсатор введен в схему
для того, чтобы можно было обеспечить
равенство сумм фазовых углов накрест
лежащих плеч моста. Регулировкой
резистора
введен в схему
для того, чтобы можно было обеспечить
равенство сумм фазовых углов накрест
лежащих плеч моста. Регулировкой
резистора
 устанавливается
требуемый угол фазового сдвига плеча,
составленного резисторами
устанавливается
требуемый угол фазового сдвига плеча,
составленного резисторами
 ,
,
 ,
частично
,
частично
 и конденсатором
и конденсатором
 и накрест лежащего
по отношению к плечу с
и накрест лежащего
по отношению к плечу с
 .
Регулировкой резистора
.
Регулировкой резистора добиваются
выполнения условия равенства
произведений модулей сопротивлений
накрест лежащих плеч. Таким образом оба
регулировочных элемента
добиваются
выполнения условия равенства
произведений модулей сопротивлений
накрест лежащих плеч. Таким образом оба
регулировочных элемента
 и
и
 одновременно
используются для балансировки мостовой
схемы.
одновременно
используются для балансировки мостовой
схемы.
Мостовая схема
используется и для включения
дифференциальных датчиков. В схеме
на рисунке 4.8.3.2 а) два плеча моста
образованы индуктивностями обмоток
дифференциального датчика, а два других
резисторами
 ,
, и
и .
Поскольку катушки
датчика имеют одинаковую конструкцию
и одинаковые параметры, то для них углы
фазовых сдвигов близки, и второе условие
равновесия мостовой схемы обеспечивается
автоматически.
.
Поскольку катушки
датчика имеют одинаковую конструкцию
и одинаковые параметры, то для них углы
фазовых сдвигов близки, и второе условие
равновесия мостовой схемы обеспечивается
автоматически.
Для балансировки
мостовой схемы при неравных значениях
индуктивностей
 и
и в процессе настройки служит резистор
в процессе настройки служит резистор ,
которым добиваются
выполнения первого условия равновесия
мостовой схемы.
,
которым добиваются
выполнения первого условия равновесия
мостовой схемы.
Вмостовой схеме, приведенной на рисунке
4.8.3.2 б), плечами
моста являются индуктивности датчика
 и
и ,
а также обмотки
трансформатора
,
а также обмотки
трансформатора
 и резистор
и резистор
 .
В этой схеме
указатель подключен к измерительной
диагонали моста через трансформатор
.
В этой схеме
указатель подключен к измерительной
диагонали моста через трансформатор
 .
Такое включение
позволяет наилучшим образом согласовать
между собой выходное сопротивление
мостовой схемы и сопротивление измерителя
для получения наибольшей чувствительности.
.
Такое включение
позволяет наилучшим образом согласовать
между собой выходное сопротивление
мостовой схемы и сопротивление измерителя
для получения наибольшей чувствительности.
Резистор
 служит для балансировки мостовой схемы
при настройке.
служит для балансировки мостовой схемы
при настройке.
На рисунке 4.8.3.2 в), в приведена схема, аналогичная показанной на рисунке 4.8.3.2 а), а, но в данном случае изменено назначение диагоналей моста.
Все рассмотренные мостовые схемы работают в режиме неуравновешенного моста, при котором изменение индуктивности датчика размера ведет к пропорциональному изменению выходного напряжения на измерительной диагонали моста.
Выходное напряжение мостовой неуравновешенной схемы
 ,
,
где
 – относительное изменение полного
сопротивления одного плеча (обмотки
датчика) мостовой схемы;
– относительное изменение полного
сопротивления одного плеча (обмотки
датчика) мостовой схемы; – коэффициент преобразования мостовой
схемы (плечевой коэффициент).
– коэффициент преобразования мостовой
схемы (плечевой коэффициент).
Величина
 определяется соотношением углов фазовых
сдвигов комплексных сопротивлений
смежных плеч.
определяется соотношением углов фазовых
сдвигов комплексных сопротивлений
смежных плеч.
Фазовые соотношения смежных плеч моста:
а – синфазные, б – квадратурные, в – противофазные.

С этой точки зрения мостовые схемы разделяются на

Для включения
индуктивных датчиков размера на практике
применяются только синфазные и
квадратурные мостовые схемы, и,
следовательно,
 .
.
Выражение записано
для модуля выходного напряжения без
учета фазового сдвига. Из этого выражения
нетрудно видеть, что стабильность
выходного напряжения
 зависит от стабильности напряжения
питания
зависит от стабильности напряжения
питания и частоты питания
и частоты питания
 (в последнем случае при изменении частоты
изменяется
(в последнем случае при изменении частоты
изменяется ).
При этом
).
При этом
 ,
, .
.
Поскольку в общем виде первое условие равновесия мостовой схемы переменного тока можно записать
 ,
,
то функция
преобразования уравновешенной мостовой
схемы (при одном уравновешивающем плече
 )
будет иметь вид
)
будет иметь вид
 и
и .
.
При включении в
мостовую схему дифференциального
индуктивного датчика в выражения и
следует подставлять величину
 ,
где
,
где – относительное изменение полного
сопротивления обмотки половины
дифференциального датчика при входном
измеряемом перемещении
– относительное изменение полного
сопротивления обмотки половины
дифференциального датчика при входном
измеряемом перемещении .
.
Частотная схема включения
Д ля
преобразования индуктивности датчика
в частоту переменного тока применяют
генераторные схемы (см. рис. 4.8.4). Основой
генераторной схемы является колебательный
контур, составленный индуктивностью
датчика
ля
преобразования индуктивности датчика
в частоту переменного тока применяют
генераторные схемы (см. рис. 4.8.4). Основой
генераторной схемы является колебательный
контур, составленный индуктивностью
датчика и постоянной емкостью
и постоянной емкостью .
.
Контур включен в схему электронного генератора Г, который генерирует переменное напряжение с частотой, равной собственной частоте колебательного контура.
При изменении индуктивности датчика изменяется частота на выходе генератора, измеряемая частотомером. Частота генератора зависит в основном от индуктивности датчика и не зависит от его сопротивления потерь (это верно только в первом приближении). Поскольку сопротивление потерь датчика обычно в большой степени зависит от различных внешних факторов, то избавление от его влияния на результаты измерения повышает точность измерений.
Генераторная схема
может применяться для включения, как
недифференциальных датчиков, так и
дифференциальных.
В последнем
случае имеется два колебательных
контура, составленных каждой обмоткой
датчика и конденсаторами
 и
и ,
и два генератора
Г1 и
Г2. Частоты
с обоих генераторов
,
и два генератора
Г1 и
Г2. Частоты
с обоих генераторов
 и
и поступают на смеситель, который выделяет
разностную частоту. Эта разностная
частота, в свою очередь, измеряется
частотомером. Подбором емкостей
поступают на смеситель, который выделяет
разностную частоту. Эта разностная
частота, в свою очередь, измеряется
частотомером. Подбором емкостей и
и генераторы
настраиваются так, чтобы в одном из
крайних положений измерительного
стержня датчика выполнялось условие
генераторы
настраиваются так, чтобы в одном из
крайних положений измерительного
стержня датчика выполнялось условие
 и
и .
Тогда показания частотомера будут
пропорциональны величине смещения
измерительного стержня из крайнего
положения.
.
Тогда показания частотомера будут
пропорциональны величине смещения
измерительного стержня из крайнего
положения.
Чувствительность преобразования частотной схемы включения

и относительная чувствительность
 .
.
Сравнение чувствительности преобразования частотной схемы с чувствительностью других описанных схем показывает, что ее относительная чувствительность в 2 раза ниже, как это следует из формулы.
Трансформаторная схема включения
В заимоиндуктивные
датчики включаются по трансформаторной
схеме. Трансформаторная схема
включения недифференциального
взаимоиндуктивного датчика показана
па рисунке 4.8.5.
Одна обмотка
датчика питается переменным напряжением
постоянной величины
заимоиндуктивные
датчики включаются по трансформаторной
схеме. Трансформаторная схема
включения недифференциального
взаимоиндуктивного датчика показана
па рисунке 4.8.5.
Одна обмотка
датчика питается переменным напряжением
постоянной величины
 .
За счет магнитной
связи между обмотками во второй обмотке
наводится ЭДС, которая измеряется
соответствующим вольтметром.
.
За счет магнитной
связи между обмотками во второй обмотке
наводится ЭДС, которая измеряется
соответствующим вольтметром.
Изменение измеряемого размера приводит к изменению связи между обмотками и к изменению ЭДС на вторичной обмотке. Таким образом, ЭДС на выходе вторичной обмотки будет зависеть от измеряемого размера.
Напряжение на
вторичной обмотке
 ,
,
где
 – взаимная
индуктивность первичной и вторичной
обмоток;
– взаимная
индуктивность первичной и вторичной
обмоток;
 – индуктивность
первичной обмотки.
– индуктивность
первичной обмотки.
Если принять, что взаимная индуктивность М остается постоянной, то выходной сигнал схемы включения
 ,
,
где
 ;
; .
.
Последнее выражение справедливо при отсутствии нагрузки в цепи вторичной обмотки. Для цепи питания в этом случае нагрузкой является в основном полное сопротивление первичной обмотки.
Дифференциальная трансформаторная схема отличается наличием двух вторичных обмоток у датчика. Измерительный вольтметр в этом случае измеряет разность напряжений на обмотках.
Трансформаторная схема включения индуктивных датчиков весьма проста и практически не требует каких-либо дополнительных элементов. Однако конструкция датчика при этом усложняется, появляется потребность в нескольких обмотках и соответствующем количестве соединительных проводов.